Welcome back! It is great you are working on your mower again. I went through a similar period in building my mower with life issues taking over for a while, but in the end I got It built and now it is a useful machine. That Club Cadet is a nice mower. Feel free to reach out for help on issues through any of the blogs or through the Ardupilot message system. @SJohnson
Your list of equipment sounds pretty good!
1 Like
At first blush I don’t understand the need for the Ardunio MEGA. You know you can pass the RC signals from your radio remote through the flight controller right on out to the servo rails and to the servos? It does require you have the channels an control knobs etc.on your remote. I control the hydro-static drive servos, the remote emergency kill switch, the throttle servo, and my mower deck blade clutch relay all from my RC remote. In my case i still have a mechanical parking brake. I saw other mower builders at MowStock doing pretty much the same thing. It depends on your RC receiver, but sometimes you can plug some of the servos directly into the RC receiver servo rail. Some of the older RC receivers still have a servo rail. Even if your radio receiver doesn’t have a servo rail you can pass the signals through the flight controller with proper setup and plug the secondary servos into that rail. I learned this at MowStock this year from @Swebre!
1 Like
I will look into this… my reasoning was/is as follows:
- the mower has to be converted back to manual/mechanical in a couple of hours if need be. I remove things like the accelerator and choke levers, and replace these with 3D printed panels/covers with my own controls. The only things I am non-destructively are the rods to the hydros, and the bowden wires to the brakes, throttle and choke. The latter two will simply be unhinged and removed.
- I wanted to electronify the mower first; to change it from mechanical to electronic inputs and outputs. This involves ripping out the wiring loom, and replacing it with my own. This will aid point 1… but also negates the need to ‘ruin’ the original wiring loom by cutting/splicing into it… and I only need the switches has pull-downs for digital inputs. The latter approach makes them fail-safe in case of cable/contact breakages.
- This problem I haven’t solved: how to switch to autonomous inputs. Maybe FETs, etc. haven’t really thought about it yet.
Step 2 is IMHO important, as the mower behaves like a normal mower, though with added features, like auto rev control (thicker grass = more throttle), auto-choke. It is a half-way point in case I cannot complete the automation.
I have the MEGA prototype going, with switches and servos and all; and it works.
But yes, I take it on the chin that there could be something learned or change based on what you said. While I have a remote controller, I have no intention of using it… as I believe either this thing drives itself or not.
Automation was thought of as an add-on, that could seemingly bolted on by flicking a switch… yet leaves me with a fully working, manuals, but electronified, mower,
I bought the list of things based on input from forum members, and further reading, that this equipment removes the issue of less mainstream components potentially causing related issues.
As for the CubCadet: I chose it for its brilliant engineering. This is the revamped/re-engineered version. The wiring diagram is a work of art. For me it is the Tesla under the mowers in this category. Not one part to many. Not one thing I found to improve on.
[edit] I figured out the switching between input sources: a bunch of CD4066 or 74HC125. Problem solved. ![]()
1 Like
It sounds like you on a very different mission than the rest of us.
Most people building mowers give up manual operation and use an RC controller to move it on and off trailers or just to move it around. After a mission is loaded the auto is engaged and the mowing starts. In my case I can switch back to manual in less than 30 minutes by pulling the connecting bolts out of the servo attachment and hooking back up the levers. I also have to put one screw back in the throttle linkage or set the throttle with the radio. So far I have never had to change it back to manual and I don’t plan on it but I do carry the parts and tools on the mower in case I need them.
Your mower sounds unique and I am sure we will learn from your experiences.
2 Likes
![]() all good…
all good…
I don’t think I am on a different mission.
The mower stays on the same ten acre property; no loading/unloading.
The 'revert back is for an eventual sale / replacement.
The switch between auto and manual drive is for me, expecting that I have to go along some fence line or tree, shrubs, etc. in particular in and around the fruit trees; close to the trunks.
And yes the electronification even in manual is a bonus, as I have different soil moistures on the property, where grass density changes significantly, and the auto-throttle keeps the rpm. I do not run the mower on full throttle due to differing densities and it would be an overkill, as in waste of petrol.
In short: at least at present, I believe to have areas on the land and auto-mower would either not cut at all or not well enough, hence, the requirement for manual mode. Even remote control will not provide the precision (because I can’t see to it), hence, I rather sit on it and I am darn quick too. ![]()
I see a 80/20 split between auto and manual operation.
I solved the input source switching in principle, hence, no issue now to switch between MEGA and Pixhawk.
1 Like
Okay I will follow your advice and go with 3 SimpleRTK2B modules (are those on the link okay?) in moving baseline configuration and one GPS as a fixed base. Yes I plan to mow at different locations and it is inconvenient to set up a fixed base but my question now could I set up like “temporary” fixed base near the location that I want to mow and then transfer it to a different location and do the same thing. For example, mount this raspberry pi and GPS on the tripod as you did, and then from this temporary base I could send corrections to my mower, and when I am done mowing one location move everything to a completely different one and continue to mow. Is this possible?
What is next on the list of things to purchase? Servos or something else.
Thank you, everyone for the great advice and best regards
Jan
I would suggest that tackling the servo problem would be a logical next step. Getting the right servos, figuring out where and how to mount them and then getting the linkage arrangement correct is a bigger deal than you think. Putting servos on a machine that was never designed to have them is sometimes not easy. It takes work to get the linkage arrangement right so you get the same range of movement that the old mechanical levers gave you from the neutral position to full forward and then to full reverse. For this you need something to move the servos like your RC joystick box and a battery or a servo test box.
Once you accomplish this task you can then actually drive your mower with the RC joystick feeding through the flight controller in manual, which is a huge first step to automation.
In all fairness i will admit that I do a small amount of cutting in around some things with another old manual mower in the very complex areas, at least for now. I also left the seat on my mower so I can sit on it and drive it around to mark GPS coordinates and to mow using the joystick if I want. But between using just a little more Round-up around the edges and getting better at using the autonomous mower, I hope to make cutting in a small task.
In any event the gang here on the Ardupilot website is here to help you with getting the your mower going if we can do so and we hope to learn about all aspects of your automation. It is interesting to note that at MowSock 2023 I noticed that most of the veteran mower builders have all done away with the seats on their mowers. I think they get good at using those things and it’s hot out there setting on a mower. ![]()
I will do my best to try Souce 2 12V AGFRC servos although they are a bit outside of my budget, will a 45kg version work fine or do I need a 66 kg version?
The next things that are giving me problems are radio transmitters and receivers and telemetry radio sets. What is a good budget Radio transmitter and receiver? And for what is used Telemetry radio set from Holybro for.
I want to pick a radio transmitter and receiver so I can get to work with making my mover be able to move in manual mode using Joysticks as soon as possible
1 Like
Neither. You want the bigger 100kg version if you want AGFRC servos for your drives, as I mentioned above.
AGFRC 100KG High-Torque Digital-RC-Servo-Motor Waterproof - Metal Gear Brushless Servo
The RadioMaster TX16S is an outstanding radio for the price and the application. I prefer the ExpressLRS version and a matching receiver from RadioMaster, Matek, or HappyModel. ExpressLRS does come with a little initial configuration pain, but it’s worth the time as far as I’m concerned.
The telemetry setup is used for remote connection to Mission Planner. You want that, also. I prefer the ones from mRo, but there’s nothing wrong with Holybro hardware.
mRo SiK Air Telemetry Radio V2 (mrobotics.io)
If your mowing sites are all within about a 40km radius, you can set up a fixed base at one location to stream data to RTK2Go and use that as a free NTRIP source. You will, however, need an internet connection of some sort at each remote location to make use of it.
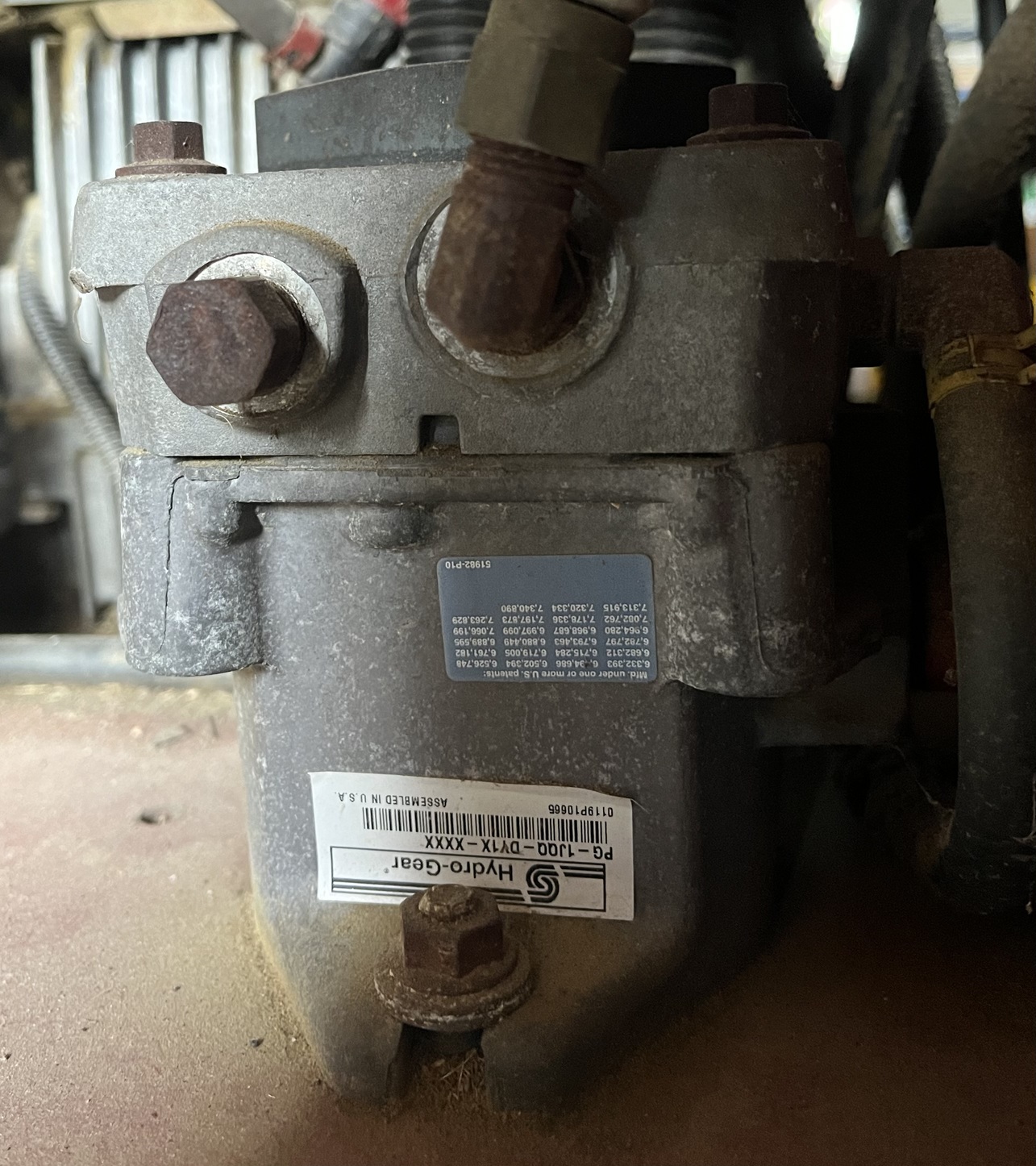
I think the first step is confirm which Hydraulic control valves you have for sure. Take a picture of them and post it. If they really are HydroGear transaxles then I then I believe the 45 kg version would likey work but it would be best if we get input from folks that are using the 12V AGFRC servos. I use the old D845WP servos and they are basically 45 kg servos on a HydroGear transaxle
The telemetry radio is used for your windows computer to maintain communication with the flight controller in the mower. The telemetry radio is used to show status of everything going on with the mower (this can include hundreds of items but the big ones are failsafe systems, arming, the status of both GPS units (FIXED or not), the number of satellites you are tracking, HDOP ( positional precision you are maintaining) Sometimes it used to send Mission Planner mowing plans to your mower and sometimes it is used to send the GPS correction signals from your laptop to your mow (depending on how your base station setup is configured). Needless to say the telemetry radio is a critical piece of equipment. The good news is that a telemetry SiK radio doesn’t cost that much. One radio receiver/transmitter generally hooks to your laptop and the matching receiver/transmitter is mounted on your mower. I bought an expensive high powered RFD900 telemetry radio set and it is way overkill. A cheaper Holybro set will do just fine.
https://ardupilot.org/copter/docs/common-telemetry-landingpage.html#common-telemetry-landingpage
The RC transmitter is your close range joystick box which allows you send signals to a matching receiver on the mower to manually drive the mower and it can be configured to also do a wide range of things (like engaging auto pilot, marking GPS coordinates, throttle up your engine, engaging your mower blades, and activating an emergency kill switch if you don’t like what you see). The ways RC systems can be configured is endless just like the number of choices for those devices. They come in all price ranges and capabilities.
https://ardupilot.org/copter/docs/common-rc-systems.html
I went with a very cheap 10 channel RC radio on my build and I have had it a few years and it is still working fine. I am glad I got a cheap one because i have drilled holes in it and modified it many times to do special things. If would have been expensive, I would have refrained from modifying it. I have learned a lot because I wasn’t afraid to tear into it. What I am using is a FLYSKY FS-I6X with a 10 Channel receiver you have to buy separately. People will probably razz me about my RC radio but it works for now.
https://www.amazon.com/FLYSKY-Transmitter-Controller-Receiver-Upgrade/dp/B07Z8VCB45
The AGFRC servos rarely deliver their rated torque. I have the light duty HydroGear transaxles, and I would NOT try to drive them with the smaller AGFRC servos. Use the 100kg ones I linked or go with an alternative.
Go with the HiTec D845WPs at a minimum. If you want to be a slight guinea pig, you can try the HappyModel servos I linked above. They are cheaper but VERY (overkill) strong and quite large.
If anyone can find an economical source for these HiTec servos, they would likely be outstanding! But at $500 US, they aren’t even worth considering!
I will say that 10 channels is not really enough.
1 Like
I have a cub cadet mower ZT2 and measured the following values with a force meter:
(force required to pull and move the mechanical actuators)
12N choke with spring
0N choke w/o spring
35N carb with spring
48N brake with spring
3N brake w/o spring
25N hydro w/o spring
to arrive at kg divide by 10.
Meaning, that when springs are taken off, these ‘actuators’ barely need any force to operate.
I ordered the following servos yesterday:
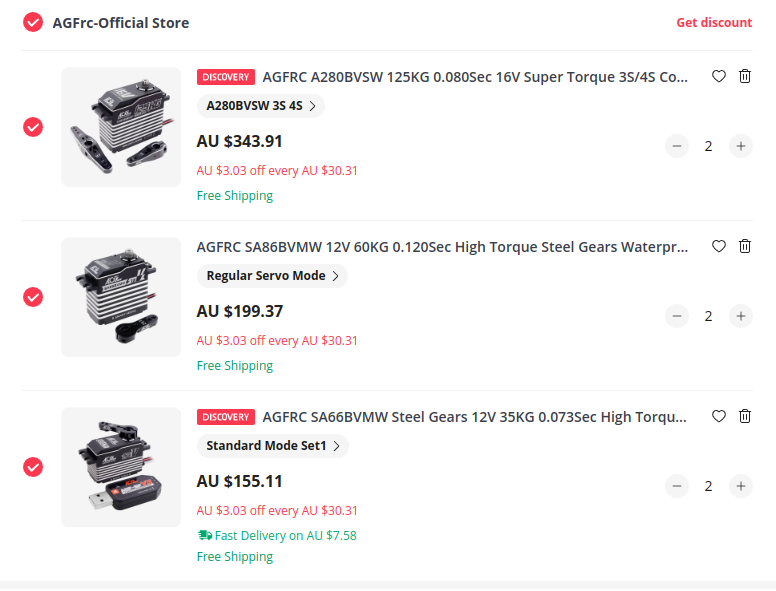
Top one for hydros
mid for brakes
bottom for gas/choke
So even if these do half the stated values, these should be good enough to operate the relevant levers. But, since I haven’t installed and tested them, I can only go by their specs.
Hydrostat linkages are fairly standard:

The spring can be replaced with weaker ones so that the these don’t ‘wobble’ around.
1 Like
It’s important to note that most drive units take more force to operate while the pump is running and they are under load.
3 Likes
Good point! I will measure that too and report back (update my relevant post).
Not much to report. They are the most common drive on these mowers, and recommendations so far are oriented to them. Those springs can be removed entirely.
Someday I will upgrade to that RadioMaster 16 Channel radio. It would be great to have 16 channels and all the extra switches and control knobs, plus hall effect joysticks. I am sure it would be more resistant to wear and tear from a lot of use.
1 Like
Wait’ll you see Yaapu telemetry on a color screen…
2 Likes
I can confirm that my Toro 32 uses Hydro - gear valves, model number PG-1JQQ-DY1X-XXXX.
The truth is that those AGFRC 100KG servos are too expensive for me. I know that this is not ideal but do you think I could operate these valves using the HiTec D845WP servos or do I need to wait a little bit and save up for those AGFRC servos?