Don’t have much to say or ask, but I too have built a Ardupilot Mower and an looking forward to being part of the club.
I also built a program like @Christopher_Milner that includes a perimeter and islands. One thing I do, since my mower is skid steer, is back up from first waypoint (WP0) at a 30 degree angle to the next waypoint (WP1), move forward to the next waypoint (WP1), and then reverse to Waypoint 2 (WP2). Doesn’t chew up the lawn so much.
Welcome to the group! I like the idea of going backward and forward. You can actually get the mower in to tight places by backing in and lining up along a fence for instance. With a big mower that has the center of rotation set between the rear wheels, it takes some space to ease over next to a fence close so you can drive along it. If you back in to get lined up, it is easier. It was a big discovery for me when I realized you can program these things to go forward and backward just as easy.
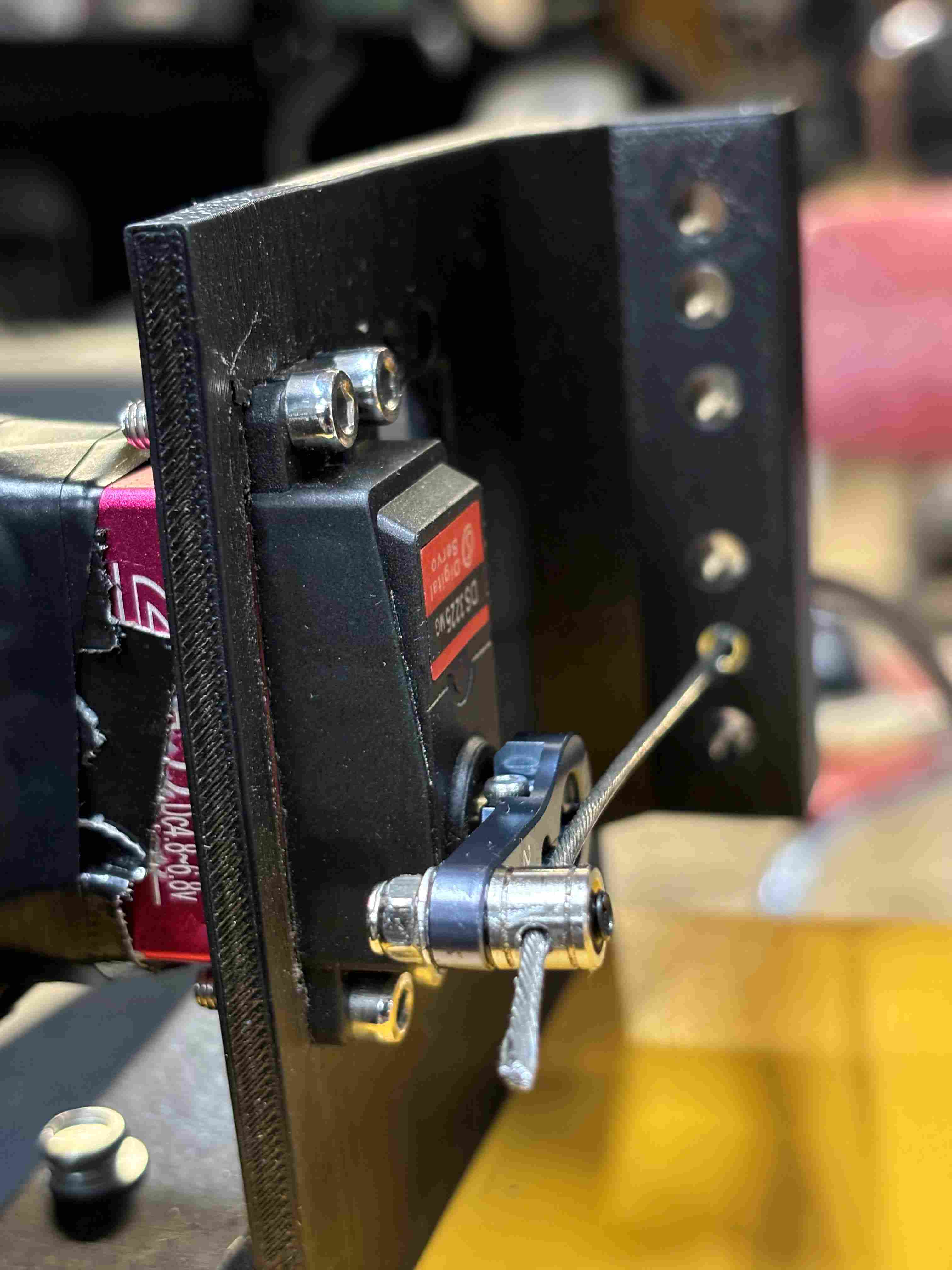
When I was at MowStock this year I learned that other builders were moving the engine throttle and choke servos out of the hot area around the engine. While we were there I worked with @ktrussell to help him make changes to his throttle and choke cable actuated throttle and choke servo system. I thought this approach was clever and since I have also burned out several throttle servos. I decided to make this improvement on my mower and I just wanted to show some pictures in case others are interested. I also wanted to share the list of the parts that we used.
Note: In this view the servo is fully actuated (engine would be at full RPM) and the cable is pulling against the governor spring straight over the center of the servo. The intent is to have no angular torque on the servo while it is fighting with the governor spring under load.
I clamp the cable to the engine by clamping on one of the barrel adjusters so I do not crush side wall of the cable. I crushed one cable before I realized how fragile they were.
The servo is nothing special. It is small, cheap, and it works for me.
Also many thanks to @ktrussell for giving me the 3D printed servo mounting bracket!
It was funny because when were there @Swebre2023 took one look at my throttle servo and said that thing will not last where I had it mounted near the muffler. Well, it burned up and that is when I decided to go ahead and implement the cable approach. My mower has the carburetor mounted right over the muffler (too close for comfort). This maximizes my chances for it burning up if I get a fuel leak and it makes it hard to mount anything near that area.
Looks great, Steve. I think that even though we install the servos in a way that keeps the torque low at full throttle as you show here, the small servos can’t handle the force pulling on the shaft sideways.
I’m replacing my rotary servo with a small linear actuator. I’ll report back when I get it installed.
Not that anything is wrong with moving the servos to a less severe environment, but both my choke and throttle servos have been going strong for about 2 seasons attached via a custom bracket near the carb, not far from the right exhaust port. I don’t necessarily advocate that approach, but it has been effective for me.
My throttle servo was always too hot to touch and didn’t last. My mower does not have a shield of any kind above the muffler. I have noticed that some do. That could makeva significant difference.
Hello ArduRover mowers.
Introductions: been pondering an autonomous mower for my 1/4 acre yard in the US for a few years, typically as I push my electric around in the dark trying to beat the heat. Can’t help but think there’s a better way. The logical response (ie, my wife’s) would be to wait a bit and spend $2k on one of the 23 autonomous mowers in my YoutTube feed. But i always need a project that stretches my understanding. After a few weeks of reading this forum, I found a mobility chair for cheap and the prototype for Mowbius got started.
End Goals, Knowing it will be a journey: Break it up into chunks… without too much to backtrack, working the hard (for me) parts first.
Launch Mowbius with the push of a button.
RTK General navigation.
stereo Vision (?) with ability to identify pending obstructions, power down for approaching animals / people; and fill in for any satellite blind spots? Leaning towards one with on-board AI… like the Oak-D sems to have some forum members dabbling with it.
vision with ability to follow a flowerbed edge. Even if RTK is sufficient for detail navigation; as much as i’d like to use one of the LIDAR “mowable area minus obstacles” strategies, I suspect i’ll need to differentiate between an obstacle and an overgrown bush that i’d want the mower to push its way under.
So far:
The mower will be built around a 20" 56V EGO push mower that had the smoke leak out of the controller. But i’m not going to work on the mowing bits until i feel good about the controls and safety features.
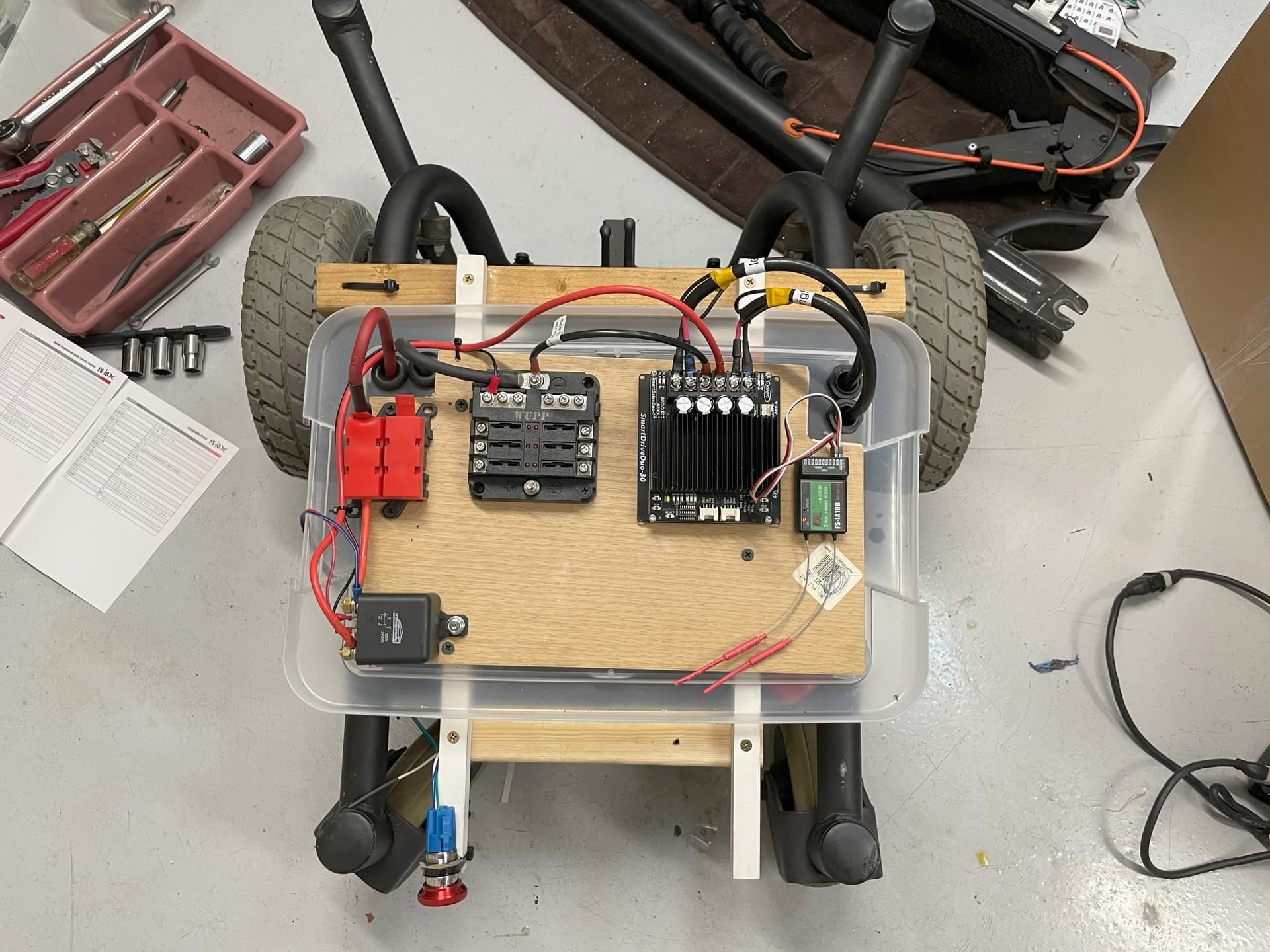
Until then i’ll use the Invicare 140 mobility chair base shown.
DTXMX Flysky FS-i6X 10CH Radio Transmitter and Receiver FS-iA10B 2.4G RC
Cytron Motor Driver 30Amp 7V-35V DC 2 Channels SmartDrive Dou MDDS30
the two 12v SLA Batteries are wired in parallel after the original 24v was a bit too fast even with Cytron configured in exponential control mode.
Up next:
Set up RTK
A. As my end goal is to have an independent - push button launch, and the corrections signals need injected into the telemetry, i was originally thinking of using a stand-alone computer with Mission planner loaded on it co-located with the base station in the shed and not require another set of radio transmitter. How capable are the 500mW 915MHz SiK v3 radios at non-line of sight? Ardusimple’s ref documentation on the topic has me wondering if i’m in a pipe-dream. Maximizing LOS would entail a solar-powered base station mounting to the chimney and a separate radio for telemetry. (full disclosure - this is my first ardu-anything build).
B. In filling out the ArduSimple application questionnaire, any idea why the ground-based rovers are (ROS based) vs the air or water drones are (ArduPilot) based? Does Ardurover not conventionally support Ardusimple?
C. Their RKT-LR kit looks enticing. However, at first blush, it’s hard to appreciate why i’d want to use their Digi Xbee based Radios ($US116) vs Hylobro’s encased v3 radio $US 63.
Add Ardupilot controller. I was originally looking at the Qiotek ZealotH743 but it doesn’t seem to have anything over the Holybro 6c or even Holybro 6c-mini
A. Is there something glaringly obvious that would point me towards using the ZealotH743 over the standard 6C over the 6c mini.?
You ask a lot of questions, but a main one I wanted to answer right away is that Ardurover does support ground base rovers. That is what all of us use here on the Ardupilot website to use to provide the control for rovers of all types (including mowers).
The most common set up is to have a windows based ground control computer running Mission Planner. That computer interfaces with the control processor onboard the mower. Once the control processor on the rover is configured and has a mission loaded, the ground control computer monitors the mission and feeds GPS correction data (if it is configured to get the data that way).
The small mower is a very interesting project!
When you are using a telemetry radio in an off normal situation performance is unknown until you try it to see what you get. I would at least put an antenna for the radio and a GPS antenna for the base on the roof of the shed, even though it is still not LOS to the mower. 500mw is a higher power level than most users send out to the mowers. A lot of people get away with using the 100mw Sik radios LOS. You will have to breadboard up your com system to see how it performs. These are pretty robust devices and there is a good chance it will still work.
FWIW, I’m running a 100mW SIK telemetry radio ( with good antennas) and it reaches a rover at 2400+ ft directly through our home with a metal roof. I would think that 500 mW should easily cover a 1/4 acre lot almost regardless of obstacles. Keep us informed. Good luck!
Gentlemen: Newbee building controls for an electric mower. Issue is: what is the best way to control my electric blade motors? Brushed, 24V, 10A max, 2-3A typical, and there are three of them. I need at least a single speed for all three that I’d like to tune to approx 5800RPM; I’d LIKE to have option of a lower speed for thin grass at about 4800 RPM; and it would be optional have it continuously variable, but not needed. I am using a sabertooth 2x32 to control the drive motors, which have similar specs. Seems like overkill to spend over $100 for a dual, and certainly way overkill for over $200 for two duals. Can I just send 24V supply to all 3 motors without the motor controller? A single motor controller 30A+? Advice?
I have only had very limited experience with motor controllers, but I will share a few thoughts. Generally people put a motor controller on each Brushed DC motor. There are manufacturing and wear differences between motors and they may not perform the same if they were all hooked to one controller. Connecting multiple motors to one controller is not recommended, however it has been done before with mixed results.
If you want variable speed control and soft start capability, you need a motor controller, and as Steve suggests, it’s likely best to use one per motor (you can try doubling them up within the current limit - you risk extra heat in the switching circuitry, which can quickly kill the controller). You can use the same output signal from the autopilot to control all of them.
If you just want to spin the motors at max speed, you can use a large relay or solenoid to apply direct voltage, but that will cause large spikes in current at startup, potentially be a bit harsh depending on the motor characteristics, and will not offer variable speed control.
You don’t need the fancy controllers that cost upwards of $100. Have a look on Amazon for brushed DC motor controllers. You can get them pretty cheaply. Make sure they take RC input, as true PWM output is a bit difficult to manage within ArduPilot’s configuration.
This one is similar to the stock ESCs on my recent tracked mower project.
Wow. Thanks guys. Esp, again, Yuri!! I love the ESC you linked. At $20, getting 3 of them seems reasonable. So, I can use one of the variable knob channels (channel 7)on the transmitter and control all 3 motors. Perfect. Then I have complete variable speed control. I know the specs on RPM of existing blade motors in mower, at 5800 RPM. I’ll probably get anal/fussy and look for 5800 at max output of channel 7. FWIW, just installed the CUAV RTK2 HP. Just run it in manual, since I need to do a quik tune. But the direction is great, it locks on rtk fixed very very rapidly (compared to LC29) and altogether looks great. I think if I could replicate your tracked slope mower project, I’d be really happy.
“With good antennas”. What antennas are you using? I have 915mhz 500mw Holybro telemetry radios. The stock antenna works OK, but fades at the back of the property. I ordered a “10db gain” antenna via amazon, but its delayed and unlikely to be anything near 10db gain anyway. Its about 7" high, so I expect some gain, but est 3-6db. I have walls to go through, so should probably have gone 433 radios. But a ham around the corner is prone to blast on that freq.
Yep. 10 dB gain might be a stretch for a 7” antenna…. However it should be much better than what the radio came with. Don’t recall the specs but my rovers both have cheap cell antennas about that size and the base has one about 18” but up at ~15’. With only 100mW, I’m reaching out 2900’ and still have stable signal. Even when blocked by my home, MP remssi still reads over 40 with a 20 noise level. With 500 mW, you should be able to reach out quite a way. If you have a long run from your radio to the antenna (I’m pushing 60’) don’t skip on coax. LMR400 or something similar will make sure most of your 500mW makes it to your antenna.
I also get great performance out of the 100mW versions. Sometimes I use my own homebrew dipoles tuned on a cheap analyzer. I prefer the mRo SiK radio variants, as the form factor is tiny, and they are US based.
Best signal I’ve ever had has been with the SIYI HM30, which is counterintuitive since it operates at 5.8GHz. Whatever magic they do carries a lot of bandwidth over quite a distance (including HD video). But they are spendy.