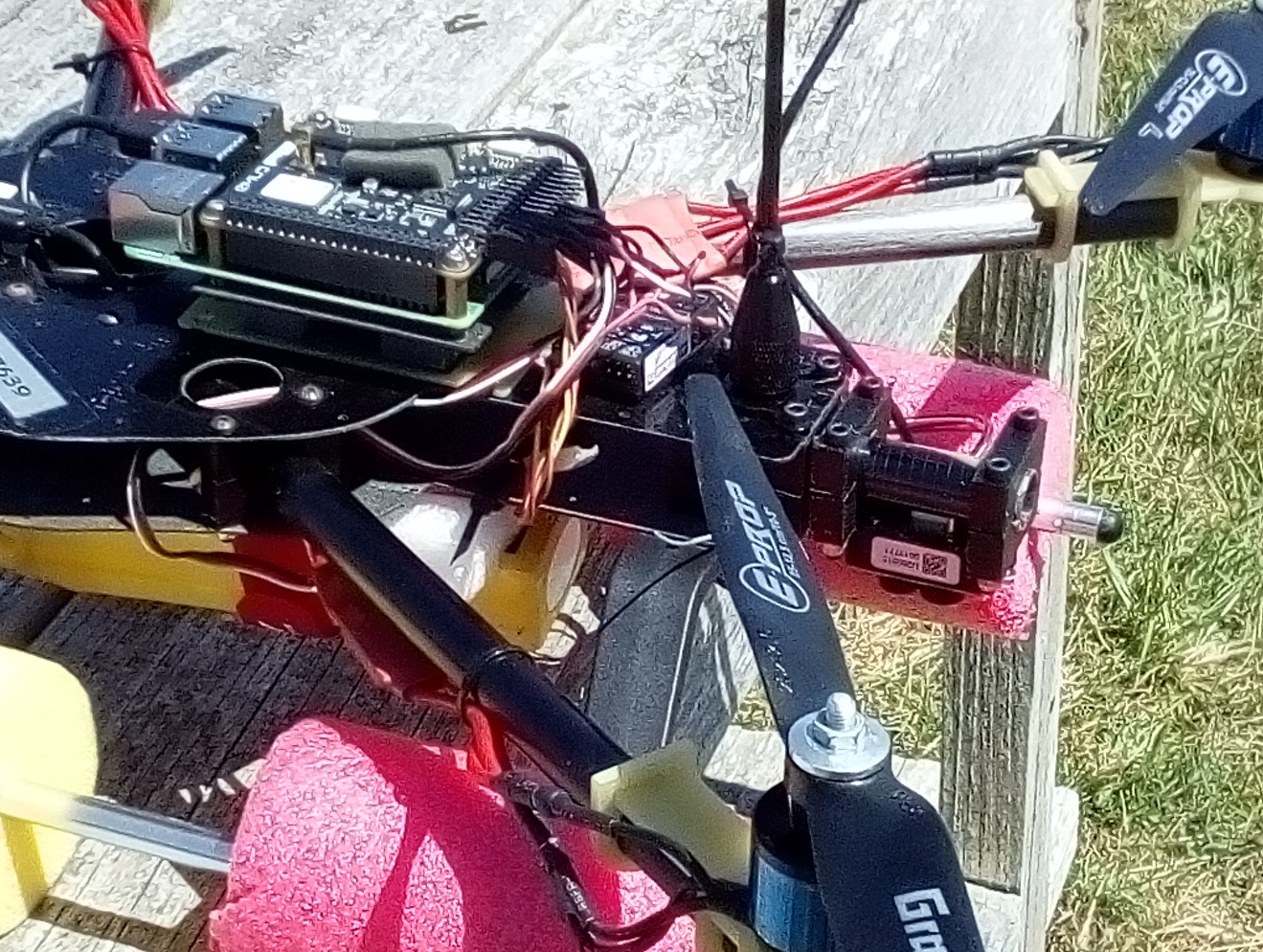
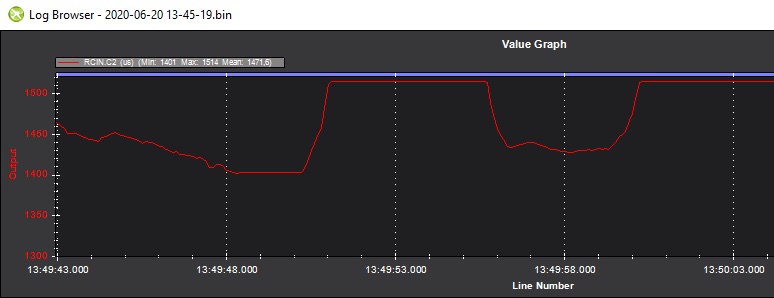
I moved after take-off close to the wood cabin at the airfield. In the video, you can see the Y6 bouncing away as I try to fly close to the wall. The camera is on ground, looking the sky.
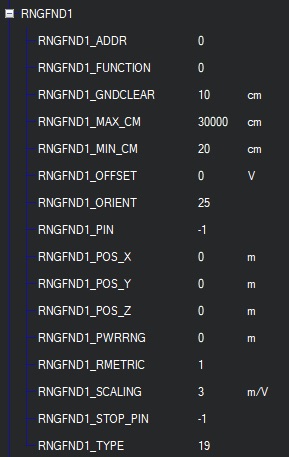
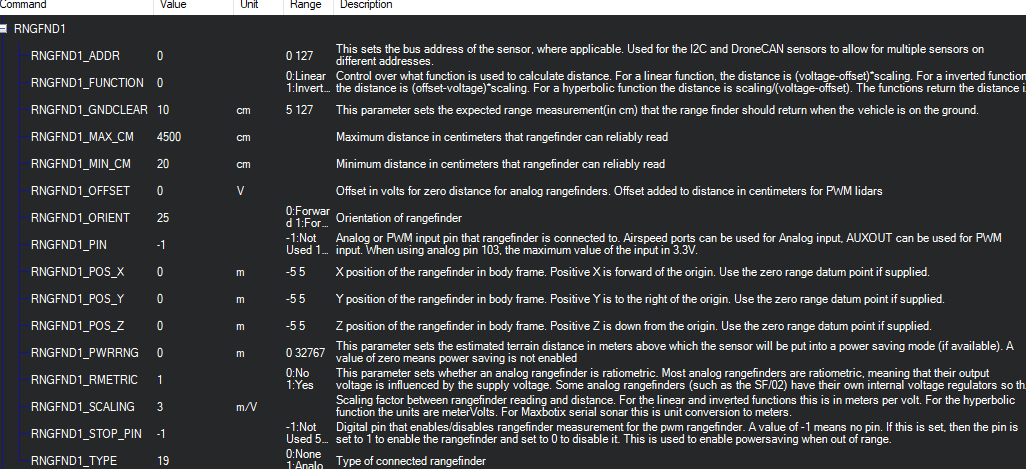
Hi @mlebret i have TF02- Pro will be these parameters work for arducopter or Arduplane landing function…i have little doubt as TF02- Pro doesn’t in the List of parameter configuration.
i have not serial version of TF02 pro .i have I2C version may be I2c address may wrong in this …how do we read the device current I2c address .i have benewake TF02 pro manual which mentioned only for the serial version to test the sensor output. do you know how to test the sensor in the i2c mode ?
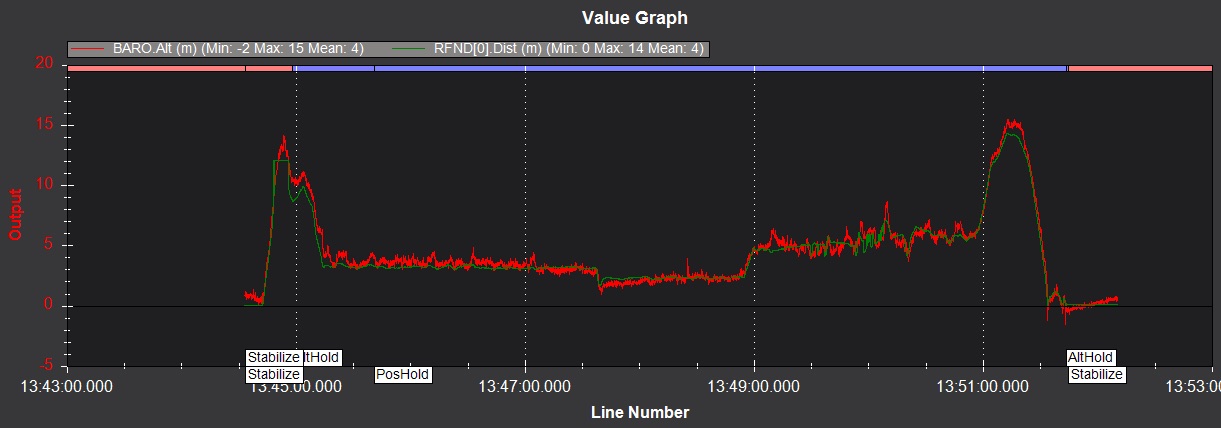
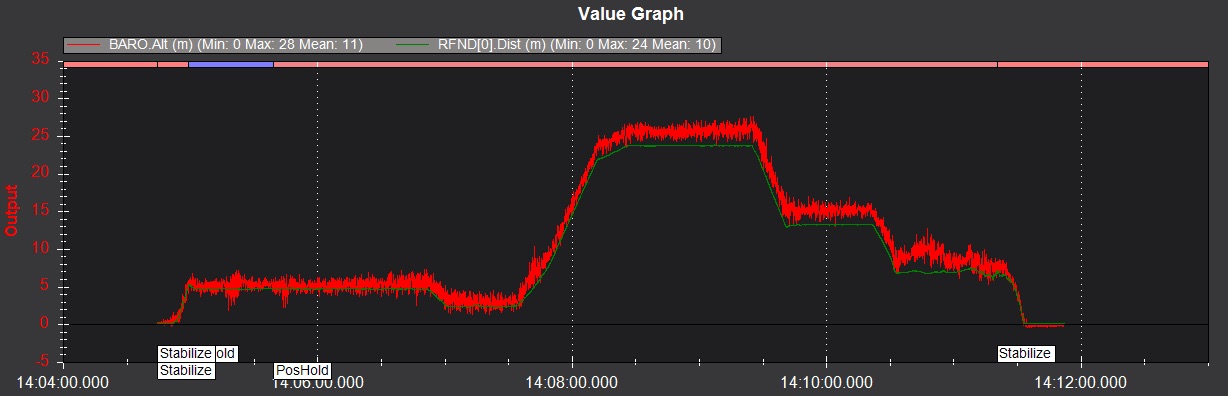
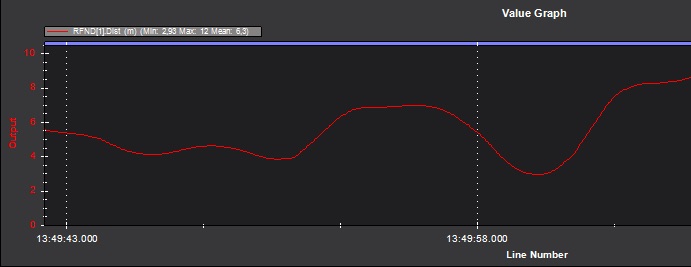
Do you happen to know if the TF02 Pro RNGFNDx_TYPE=19 works on Copter v4.2.0-beta3? I am using i2C communication. The TF02 Pro works for me on type 25 but it seems the max range is 11-12 meters even though I have the max range set to 3000cm
My first post on the forum, so sorry if I failed to leave out any pertinent details.