Dear friends,
i hope you all are doing well. i have come across a problem where i am not able to integrate and make all four Benewake TF Mini-s work on i2c in arducopter .tried various ways of connecting .Before changing the communication interface setup to talk these sensors i2c.i was able to test each lidar on GUI of benewake with data displaying. After switching them into i2c i was not able to see anything on benewake GUI.
And when i was testing i didnt get any data on Mission planner except one range finder .and if I change the parameters of others sensor ,its doesnt display any data .
i am attaching the firmware file,and params file.
quad pf.param (20.4 KB)

after changing the position of sensor i can use proximity sensor.and its was only displaying data only for 1rangefinder ,plz help me with the oarameters.
thanks
Have you assigned them different I2C addresses?
Are you using an independent 5V supply for them?
yes I have assigned different i2c addresses.
and I am not using independent 5v supply ,I have connected i2c splitter in i2c port in cube .and from connected sensors to splitter
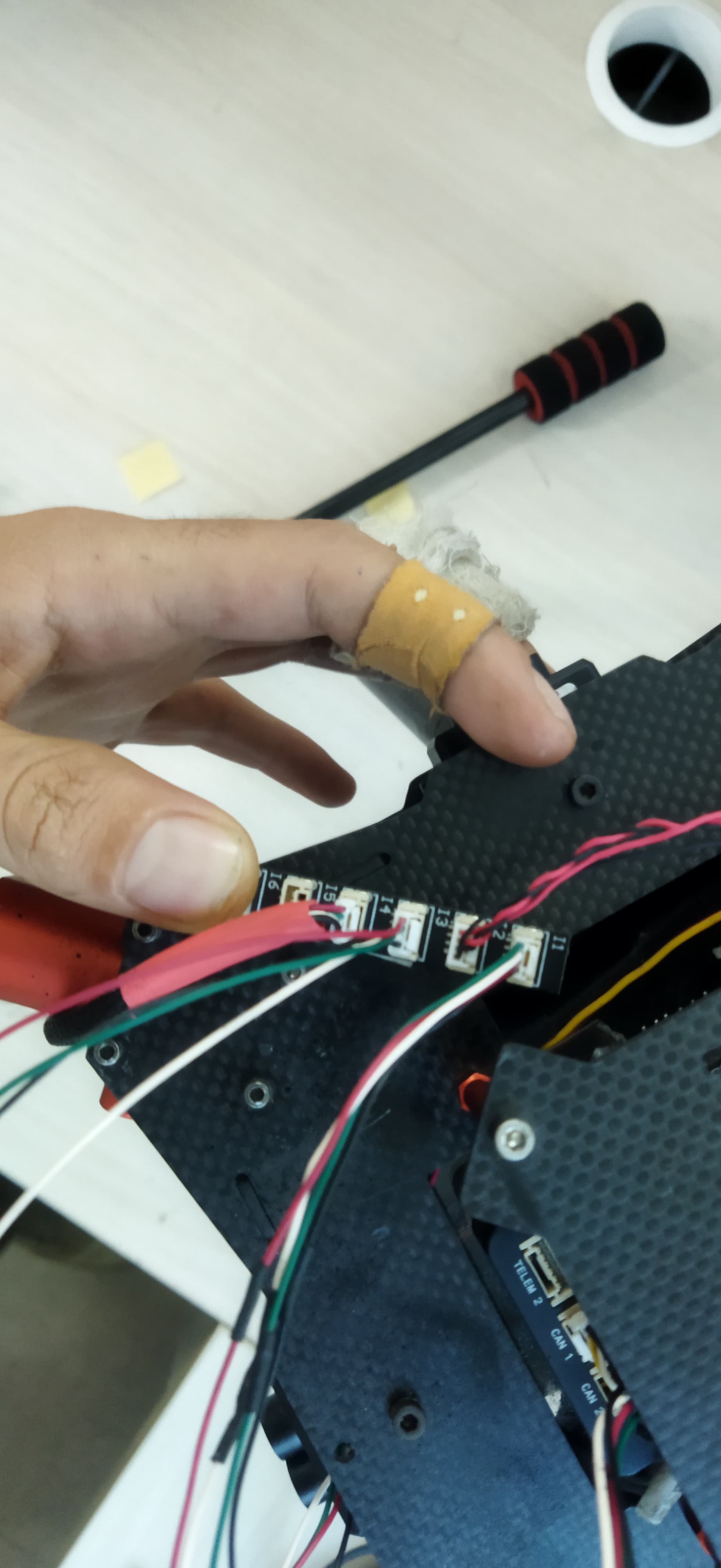
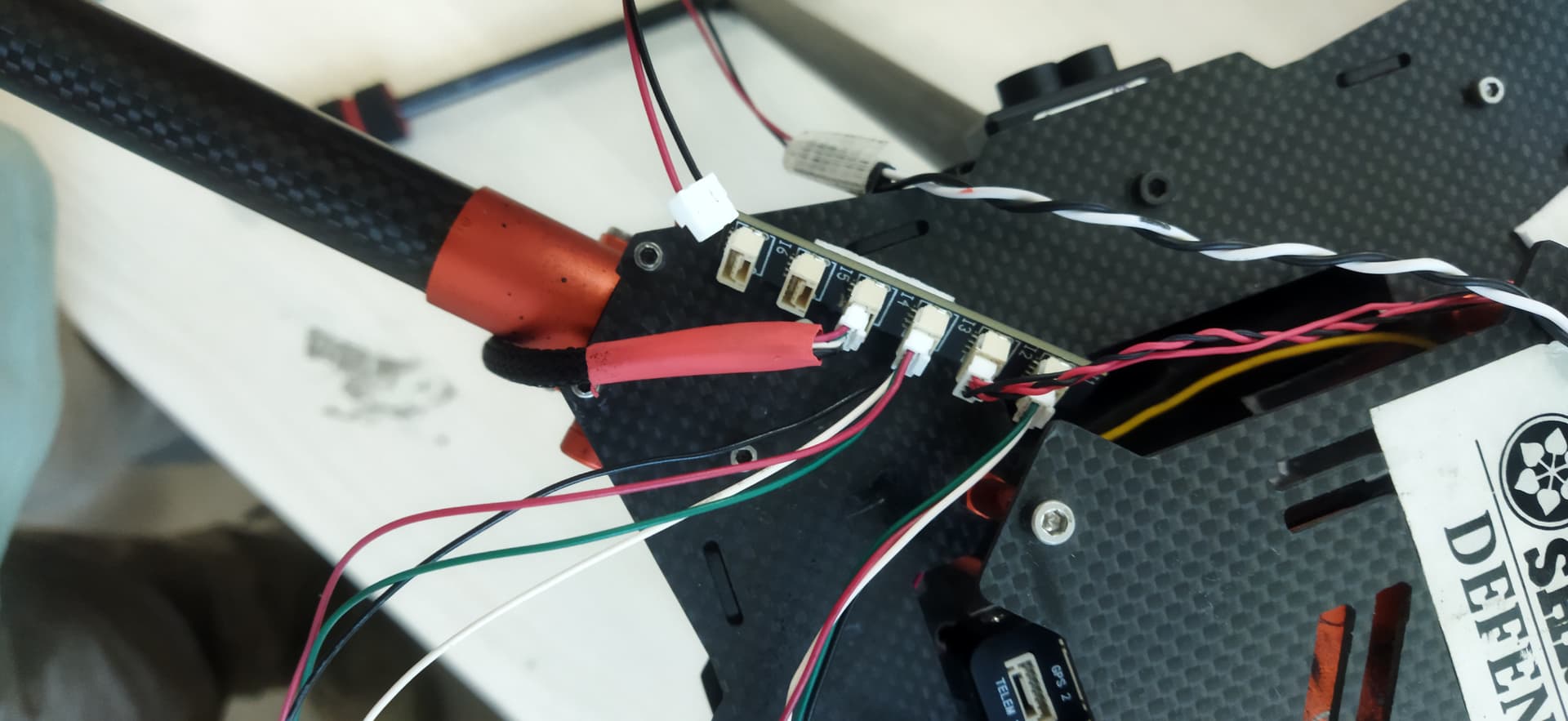
infact i tried giving 5v from pdb to i2c splitter.that also didnt work.
In your .param:
RNGFND1_ADDR,16
RNGFND2_ADDR,17
RNGFND3_ADDR,0
RNGFND4_ADDR,0
So at most you have two rangefinders active (note that this requires programming adresses on the TFmini’s).
When any rangefinder triggers a signal it is going to require a huge current from supply; you shouldn’t make it go through tiny components inside the FC (if it works, in any case it will affect components reliability), so always use an independent supply for rangefinders.
1 Like
Thanks for you quick response,
What I am able to understand is that I would have to connect the i2c splitter board to 5v external supply from pdb.(while doing that should I also bypass/disconnect the power supply and GND ports in cube orange pinouts ) When connecting the i2c splitter board to i2c of the cube and supply external supply of 5v directly to splitter board.
GND’s (black): somehow connect them together, at a single point if possible.
SCL/SDA: from FC to splitter.
+5V (red): from supply to splitter. Forget any +5V from FC.
Then connect individual 4-wire cables from splitter to rangefinders.
And FYI I am actually trying to use four numbers of tf mini-s sensors for object avoidance and at each side of the Quadcopter, and one sensor facing downwards,so with this arrangements, I would want proximity window in HUD of mission planner to display proximity data and work them as an object avoidance also I would want to use one same TF-mini s sensor facing downward which will give me the altitude data , and improvised landing.If I can make the system work with this pattern, what changes I should make , ranging From parameters to placement of sensors?i would really appreciate your support /help with this issue.and what would be the address/param for downward facing sensor.and please let me know if you need any other information.I am very keen to make this system work.thanks for your valuable time.
Have you used the i2c scan lua script to see if they are being detected at the address you have set
To use rangefinders for proximity you need to set PRX1_TYPE = 4 that will tell it to use rangefinders as proximity sensors and it will show up on the proximity display.
It still sounds like you have not programmed the new address to the range finders correctly if all you get is rangerfinder 1, if you plug another rangefinder in and it also shows as rangefinder1 then it has the same address and has not been programmed correct.
Any solution how to reset my tf mini-s ,and reassign them using benewake gui.