I’ve gotten pretty comfortable with Mission Planner and all the flight modes. Next step up would be a companion computer, but I’m not sure what I will use it for. I see many on YouTube sending commands or changing waypoints, which I feel are all possible in Mission Planner anyway.
I’m looking for what I’ll be able to achieve with Raspberry Pi or Jetson Nano that I can’t accomplish via Mission Planner.
Onboard machine vision, dynamic response to incoming data. Pretty much anything more complicated than flying this set of waypoints pointing a camera there or throwing stuff overboard
At this point, I don’t have anything specific in mind, but I love learning and I love the automation provided through Mission Planner
Apart from a 4G connection, I was looking for what else I’ll be able to do with the drone. Hopefully that’ll build up some interest and a quest to learn more.
One of the beautiful things I find in learning something are the new ideas that come up after you’ve learned something, that you couldn’t even imagine or question about before. After learning something new, you still might not be good at doing a particular task, but at least you know that it can be done by code.
I guess I was looking for some fun things I could do, which will motivate me to learn more about these companion computers
I used Raspberry and another flight controller for various tests/research over the years.
Using 3G/4G connectivity using a standard Wireless Broadband USB dongle I connected straight to the RPi whilst flying.
In doing so I tried object detection from the air → Useful for all sorts of applications from search & rescue to farmers wanting to check on livestock and fences.
Then I used a FLIR camera and attached that via USB and using VLC Player was streaming live footage. → Handy for finding hot-spots in firefighting scenarios and finding pet animals for feral animal control. - Needless to say this also comes in handy in search & rescue.
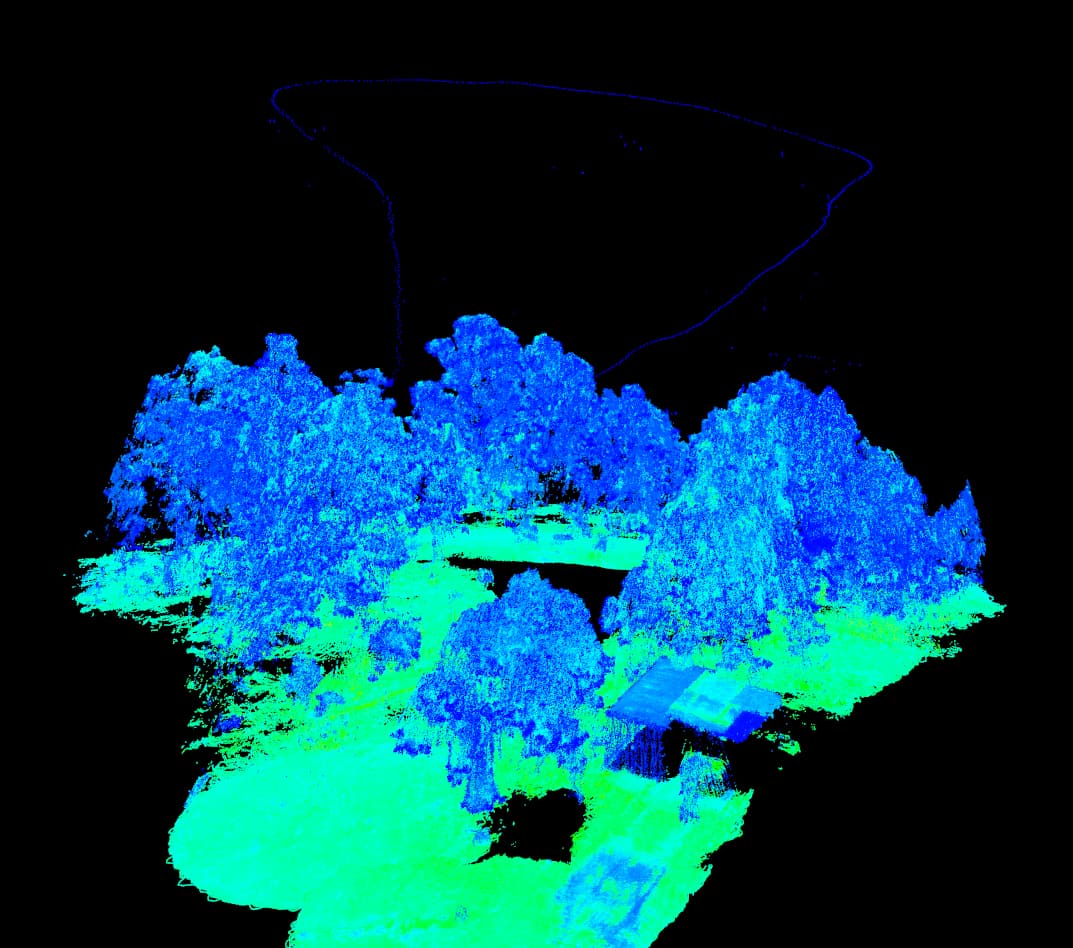
Using another mini computer I recently tested topographic LIDAR mapping using an idustrial type LIDAR unit. → Great for farming in regards to irrigation related planning, also for rainwater runoff considerations in new building estates, but also to create more precise mapping.
…These are just a few things I’ve been playing around with.
Many more available on the RPi and other mini computers.
Above image shows raw, unprocessed data.
You can clearly see a structure to the right (shipping container with a roof at one side) and the rest speaks for itself.
The above line represents approx. flight path taken by drone.
Whilst it appears to be a form of a monochrome picture, all the single points you can see represent a measuring point. So clearly a few million points in the picture. Taken at at rate of 100,000/s.