So, after extensive reading, I found the answer here:
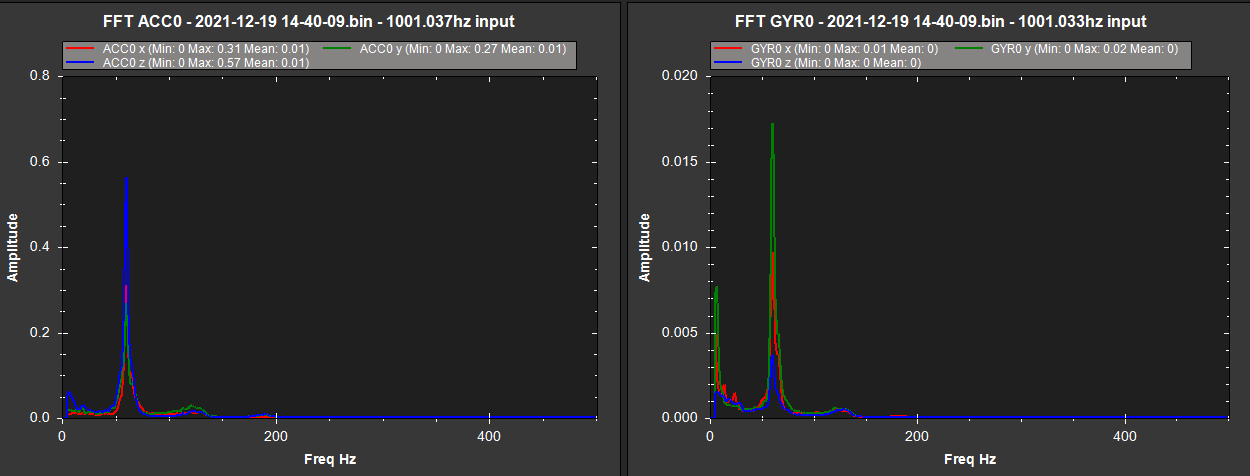
The GYR0 is to be used for the frequency. perhaps amplitude does not matter.
Going to set up the harmonic notch with hover_freq = 192, and hover thrust at 0.27. will post the results.
So, the following are the FFTUI results after post filter setup. There seems to be another peak at 60hz. However, the 192Hz peak is gone.