Hi guys,
This is my 2nd ArduCopter build, so I expected things to go much smoother.
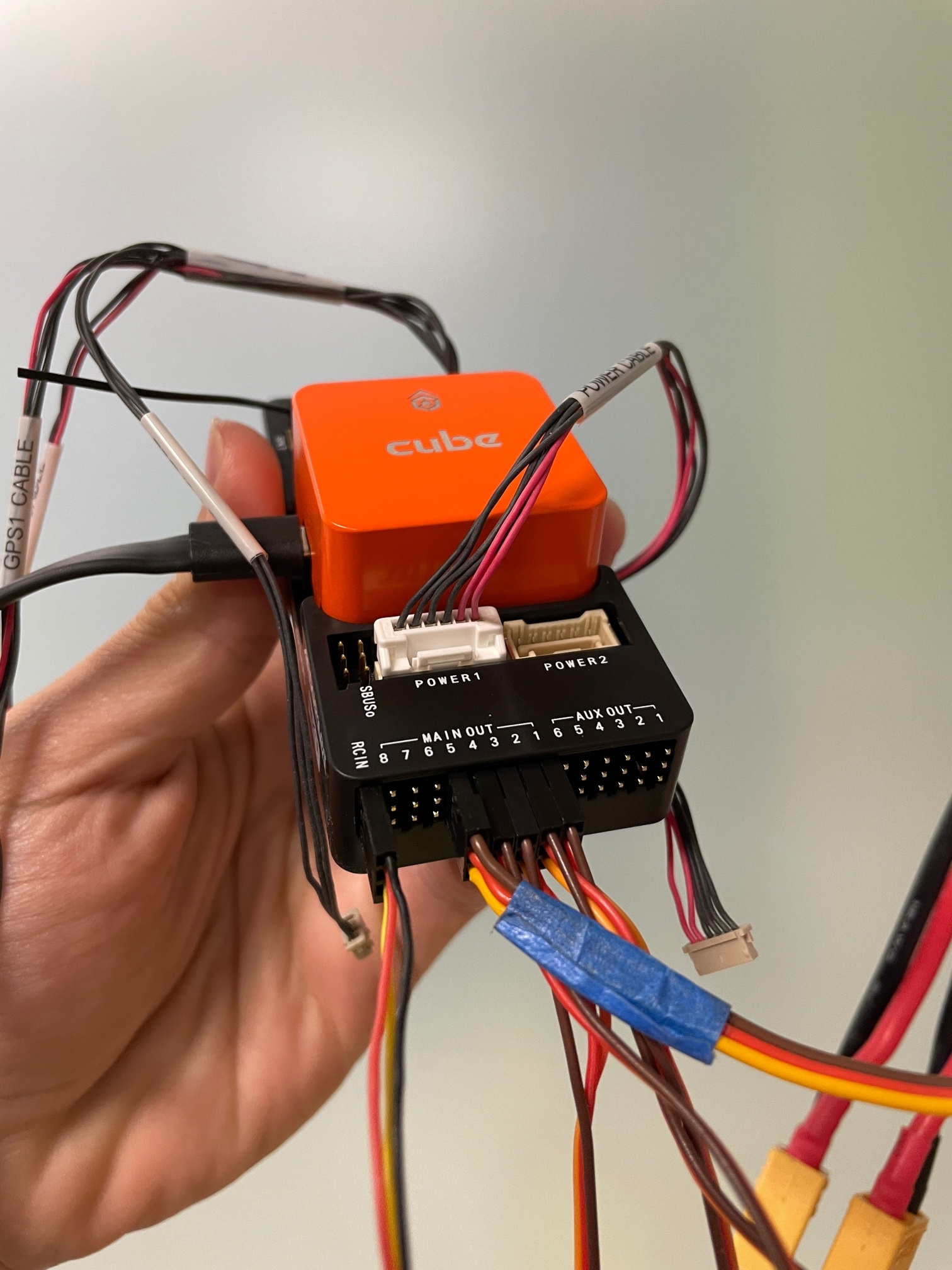
I just put together my Pixhawk Orange with a receiver, 4 servos, and a motor. I’m testing out the most simple setup for single copter. I’ve set up FRAME_CLASS8 and verified receiver and channels are mapped correctly.
The problem is that my servos still don’t move. I’m forcing arming my copter and setting throttle slightly above min and there’s no response from servos. Currently I have tiny servos connected to MAIN 1-4 and a motor connected to Main 5 (but powered off). What could be the reason for this? Thanks