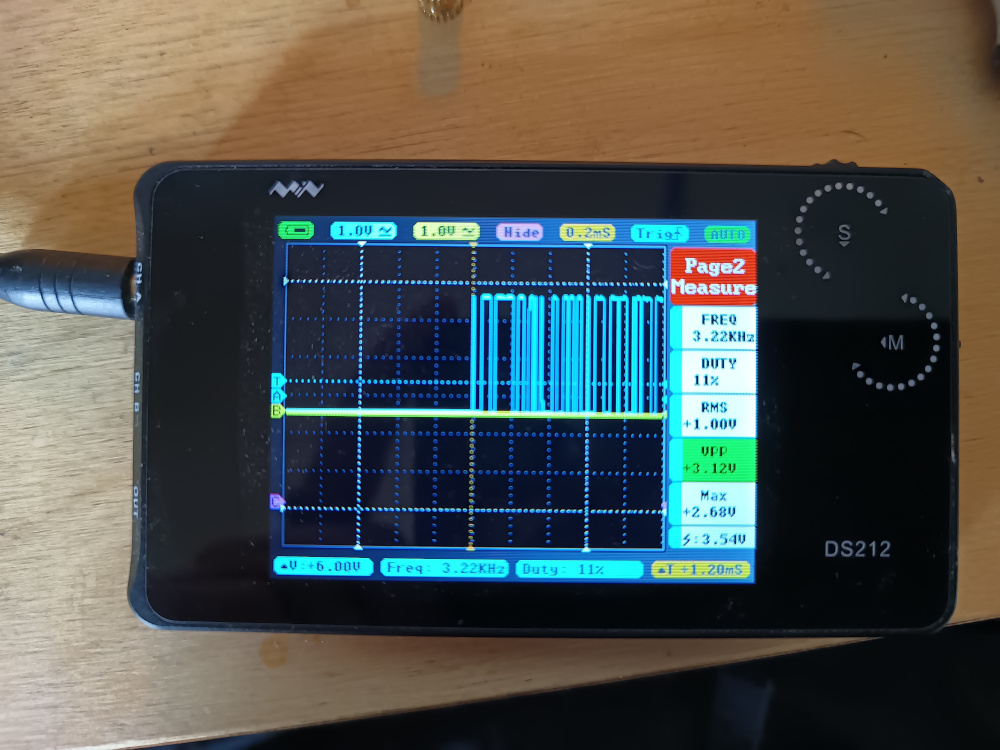
Hi all, I’m on Futaba R3008SB receiver and I’m seeing sbus1 signals on oscilloscope but gcs isn’t receiving any input and receiver is not being detected properly.
I’m wondering how I can check if sbus is working from beaglebone linux console, and not the ardupilot? it seems that it’s some serial proto, 10000 baud rate? I’d like to check this first since it could be that I burned the input before using 5v
I went through the source and I see libraries/AP_HAL_Linux/HAL_Linux_Class.cpp
#elif CONFIG_HAL_BOARD_SUBTYPE == HAL_BOARD_SUBTYPE_LINUX_BLUE
static RCInput_Multi rcinDriver{2, new RCInput_AioPRU, new RCInput_RCProtocol(NULL, "/dev/ttyO4")};
so I assume E4 pin 4 is /dev/ttyO4 on beaglebone? I’m not sure how AioPRU works and if it checks for some other ports for sbus…
If the E4 input is burned, can I use some other port for sbus? I’ve read some stuff about inverted signals, will this become relevant if I switch to some other tty? Can I switch via cmdline arguments or params or do I need to edit the source and rebuild?
No, the ttyO4 is one thing - if i not wrong there is a dsm port. The e4 pin send the data to ardupilot using a pru code to read rc input and generate rcoutput.
You can compile ardupilot with ./waf examples and this will generate programs to test rcinpu, rcoutput, baro, ins and etc.
But before any step. Please confirm your kernel version, the content of the uEnv file - mainly the line related to pru, and the content of result for the command /opt/scripts/tools/version.sh
And if there is any beep or signal in the ESCs - to ensure the pru working
I suffered a lot with some r161 receivers.
Could you measure the voltage of the sbus output? The r161 receiver was sending 2,6 volts and the pru/beagle wasn’t understating this as a high level. To do the beagle working with the r161 I used a circuit to generate 3v3. Once your motors is working you have the pru working - and this is the major causes of problems with beagles, but check the voltage level of your receiver for now - and be careful to don’t put more than 3v3 in the beagle input pins .
so this receiver has multiple working modes, including a mode in which this sbus1 output behaves like a standard aditional PWM channel using 5v signal, and so I think I pushed 5v into the beagle sbus E4 by mistake before… this is why I was curious to test it the port still works, and potentially use some other port for sbus, or if I’m done with sbus and this board
pretty sure I’m on 3.3v sbus now, but I will re-verify soon and get back with this info as well