I’ve been pulling my hair out for days trying to get my uBlox LEA-6H working with BBB and either Mission Planner or QGroundControl. I can get a connection to BBB and see all of the ArduCopter parameters, I have display of accelerometer, gyroscope, and compass information, but no GPS.
I was finally able to use uCenter to change the GPS output to NMEA, which I can read in uCenter and in the Arduino serial window.
I connected the GPS to the BBB (TX–>RX, RX–>TX) but could not see any output in Tio until I switched the leads to (TX–>TX, RX–>RX), which is counter to instructions. I can now see the NMEA output with
tio -b 38400 /dev/ttyS2
but when I start Mission Planner there’s still no GPS information.
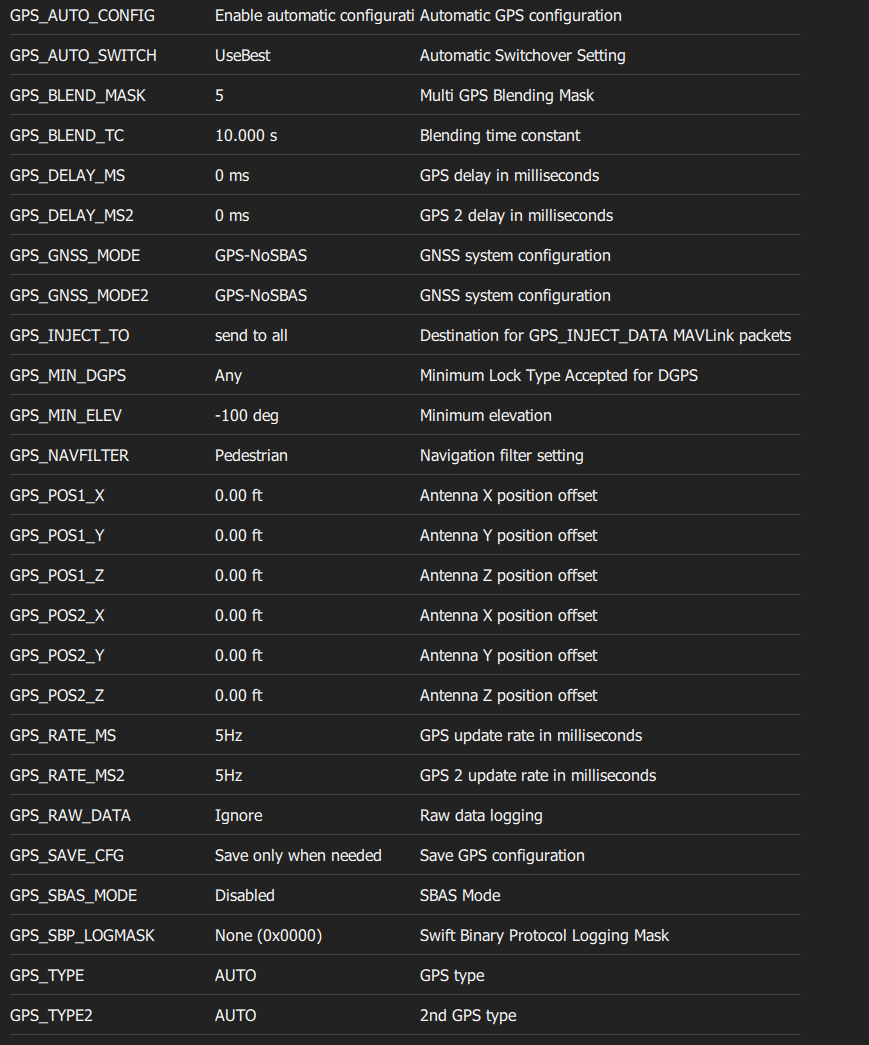
I’ve checked the serial port parameters in Mission Planner and they seem correct (serial port 3 connected to GPS at 38400). I’ve tried changing the GPS parameter to both uBlox and NMEA, but neither worked.
I am using Windows 10 powershell terminal to ssh via wifi to the BBB, and Windows versions of Mission Planner and QGroundControl.
I have run out of idea and hope the user community can help me. Thanks.