I saw that before. Are You talking about this diagram on PWM / Servo? Sorry but it is not teling me anything.
Im looking for such explenation like on the picture which i paste but for BBBlue
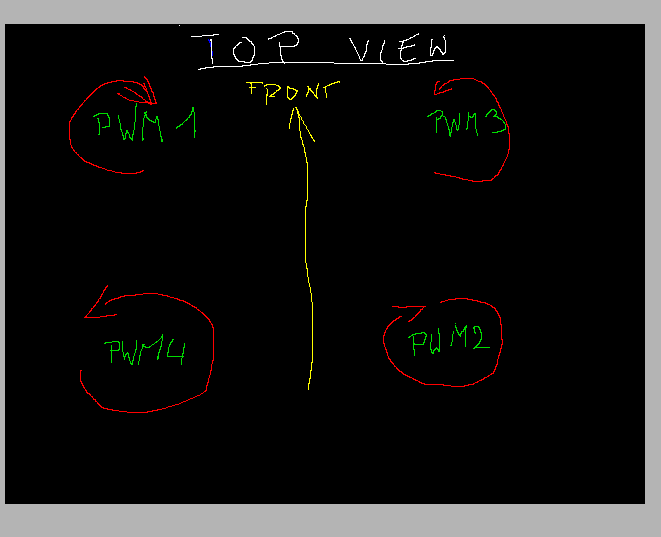
And are those images from top view or from bottom?
EDIT:
This diagram is not showing where SVO1, SVO2, SVO3, SVO4… to which motor should be connected or am i misunderstanding something?
EDIT2:
I see You changed link i saw that before too, but there is not answare for my question neighter. I woudnt ask if i could find answare with goolge before.
But this drone image is view from top or from bottom?
EDIT:
PWM numbers i have writen on the board and this is clear for me which is first i do not know which motor should go to which one PWM. Thats why i im still asking if this drone image is top view or bottom view, because
it is makeing difference.
Hmm so i had connected it like that and did not work. Drone was finishing up side down every time.
i find out some other connections:
But every image there is showing other numeration and other connection. There are different board showed. How to find out correct connection for BBBlue. Is there posibility to check it manually without starting drone? Everytime i try to go up my drone is brokeing wings or legs when somersault in random direction.
For calibration i used autocalibration from Mission Planner and second i tried with QGroundControll too (changeing ESC_CALIBRATION option to “calibrate on start”). I do not have RC im controlling (trying to controlol maybe siutes better) drone from joysitck.
Is such calibration ok or i should buy some tool for it to calibrate each ESC (BLHelli) separetly/manually?
Are You recomending some tool/script/program - if not hardware but programable then mainly Linux but if will be something only for windows, not problem - for it? I do not want to buy all RC stuff only for calibration i want to controll drone only form joystick. Or maybe is ESC calibration posible only with joysitck?
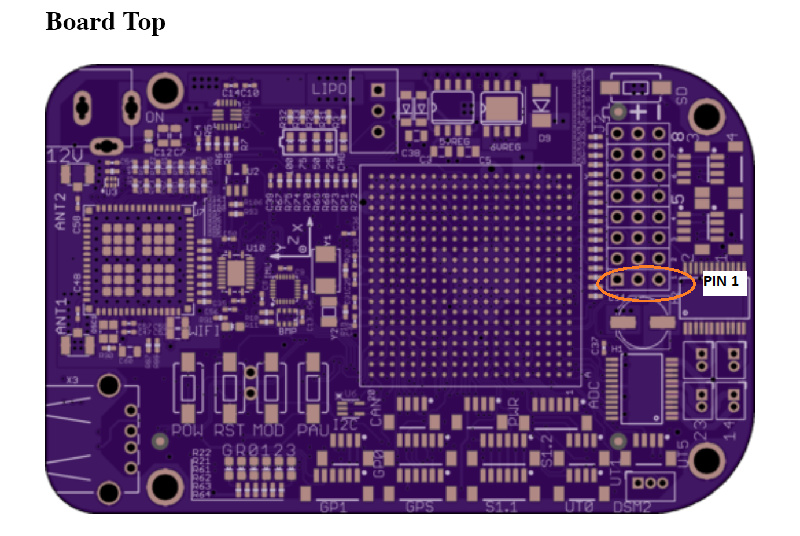
If the propellers turns in the right direction and and the pwm ports are assigned correctly and the Blue is aligned correctly ( USB ports facing forward) and you made the inititial ajustments (compas & Accelerometer) then it should work.
When looking at Mission Planner HUD, does the horizon move according to movements ?
Wait a second… maybe thats it, need to test it when i turn the board 180*, hope that will be it. Will back to You when i try it
EDIT:
YEEESSSSS!!! That was it, i almost start to cry when i saw it is going up
I saw info about that orientation before, but i thought it is according to PWM positions not an accelerometr. I configured it with 180* Yaw option and started to work after 3 weeks of fighting with BBBblue overlays (kernel changes), motors calibration and last with accelomert. Im so happy!!



{kind=link}