After updating to AR 3.2.3 I cannot activate the battery failsafe anymore. It is greyed out in the initial setup failsafe window and I cannot find the paramter in the list anymore.
What happened to battery failsafe?
That parameter changed the name, but it is still in there
I have been looking hard. What is it called now? Also, the old Battery FS settings were lost in the update and the corrsponding GUI input is greyed out now…
I have same problem, where I can find battery failOptions setting in FailSafe page?
How to set fail safe action RTL when battery low.
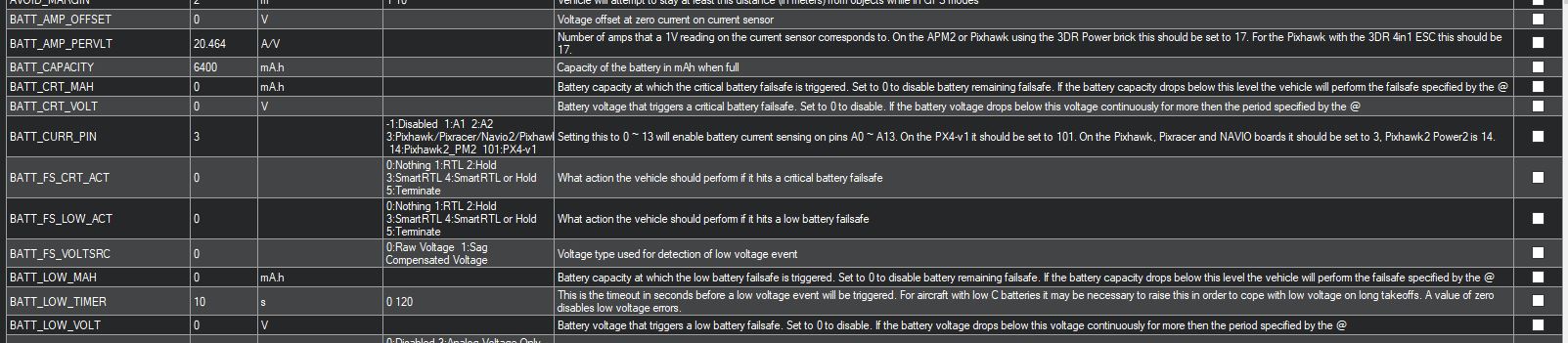
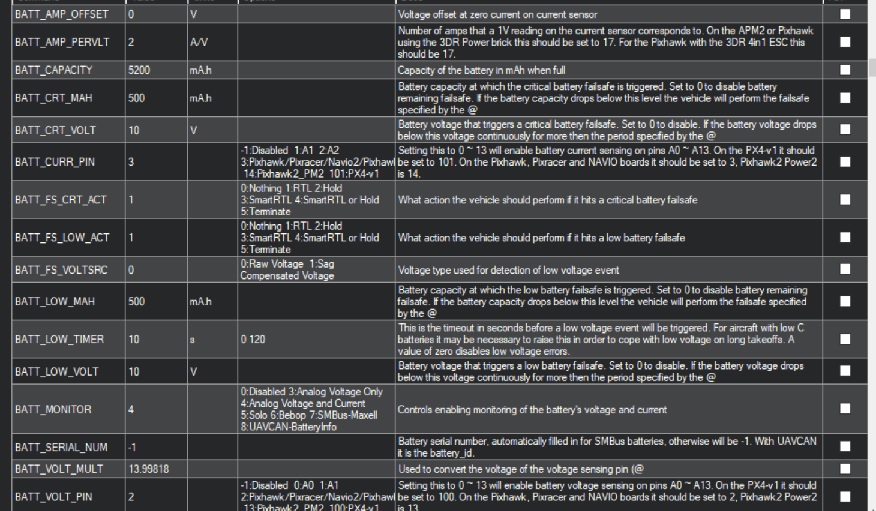
Thanks Dave, I upgraded to Rover 3.3, and setup the parameter, but it does not be triggered.
see attached image, anything wrong my setting?
So in essence Batt_low_volt parameter does not exist in AR 3.2.3 and nobody noticed so far?
I just had this boat upgraded from 3.1.2 to 3.2.3 by remotely guiding a customer to upgrade and retune the autopilot, which was a pain in the a** having to guide a customer through this procedure because all control loops and paramters changed.
AR3.1.2 failed us because of a major bug that would cause the waypoint distance to remain static during navigation and the navigation controller would quit switching to the next waypoint.
Ok, can happen, noone knows what caused this, not everyone has the same setup. Too bad this would only happen at our customers location and never in our own tests. (already made us look like idiots)
And now that we´re done there comes such an avoidable bug and the next update will be necessary?
Our customer will want to jump into my face and I cant even blame them…
The parameter exists with a different name and while updating the values get preserved. The old parameter value gets copied to the new parameter value. Should be no issue for you or the customer.
Unless you go looking for the old parameter name, not finding it and panicking for no reason.
Then yes, you have a problem 
Sorry, I cant share your optimism.
As you noticed, lumono had the same problem and was only able to find the parameter and activate the function again after updating to AR3.3.
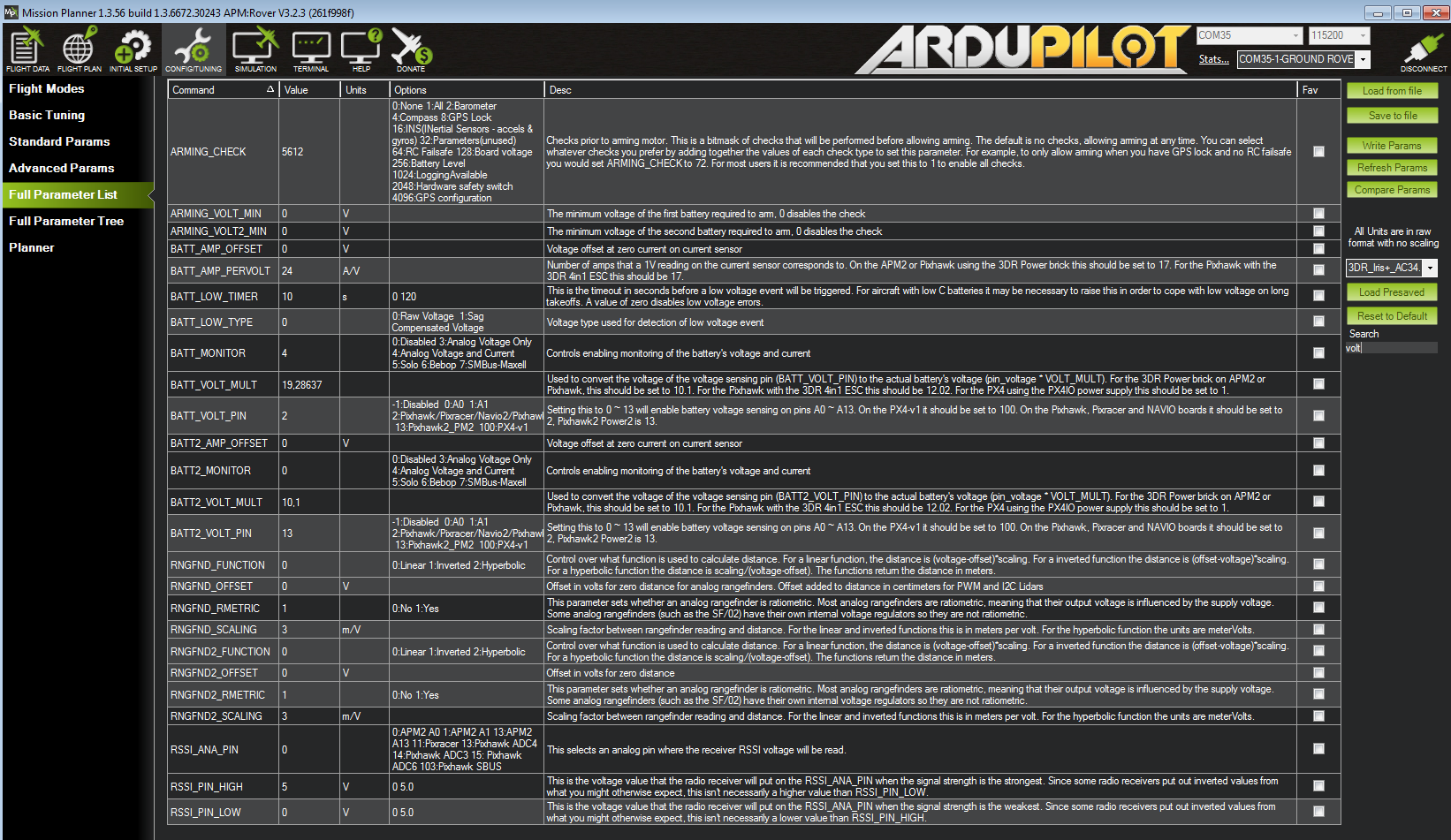
So there is “batt_low_volt” which is present in AR3.3.0. If that is the new renamed parameter, I should find it in 3.2.3 as well, yet I don´t.
And there is “batt_crt_volt” which is the parameter that is referred to in the AR and AC documentation.
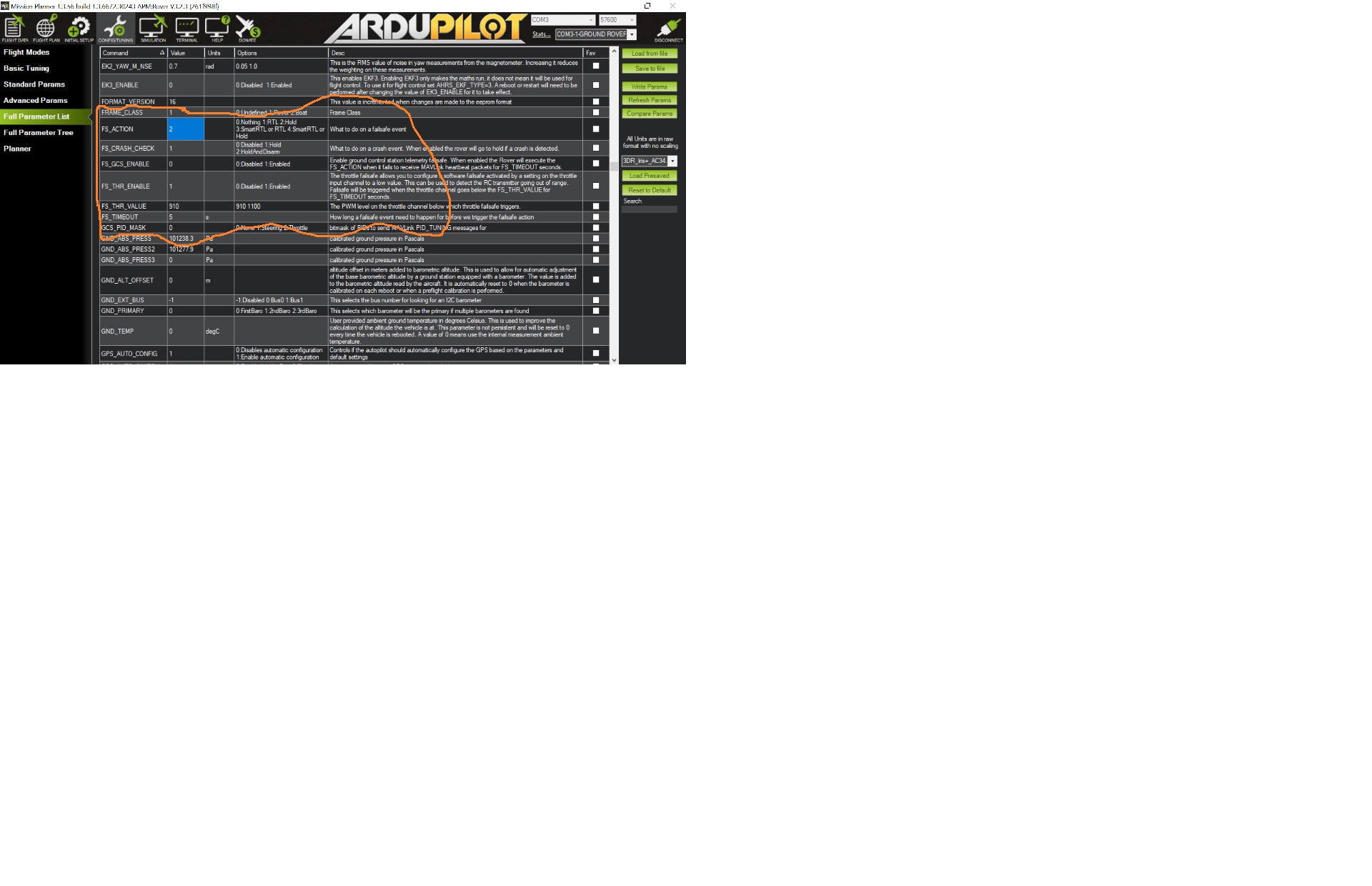
Now in AR3.2.3 neither parameter exists, so your statement to look for a renamed parameter leaves me clueless. As such a paramter should include the term “volt”, since it defines a voltage level, a corresponding search returns this.
(This is from a mint AR3.2.3 firmware installation of a pixhawk on my desk)
Maybe you can help me by actually quoting the paramter name you mean for AR3.2.3
I am perfectly fine with a solution to this isssue proving me too stupid to look for a parameter, yet I am afraid its not just me.
Or are you telling me that I cant find it because in AR3.2.3 the parameter name became “the hidden renamed nobody knows what it is” parameter and once it gets updated to AR3.3.0 the paramter will be restored to become “batt_low_volt” again, and dont make a fuss because updating to from AR3.2.3 to AR3.3.0 is just a breeze? If so, this would still be problematic.
Looking forward to get to know the AR3.2.3 battery voltage failsafe parameter name…
even Rover 3.3, looks does not support Failsafe of Voltage fail. I tried on Rover3.3, it does not work. Anybody can explain why battery FailSafe is gone?
And I cannot find Enable Continue with Mission Plan that means the rover can run at auto mode without transmitter, or transmitter power off on auto mode.
I very appreciate your help if you can.
As best I know Rover never had a battery failsafe until the 3.3 release. (If you can point me at documentation that says otherwise I’m happy to look at it on that basis).
@lumono Can you provide a log from 3.3 trying to trigger the failsafe?
1 Like
I agree with @WickedShell, battery failsafe has never been implemented in Rover. Grant raised an issue last year to add it but it has not been implemented (yet).
At the moment Rover has the RC/radio failsafe (aka throttle failsafe) and a GCS failsafe (i.e. telemetry failsafe when it loses contact with the ground station).
Oh my, that’s a little embarrassing. I somehow forgot that had gone in.
I’ve tested the feature in Rover-3.3 (in the simulator) and it seems to work so I’ve also added a new “Battery Failsafe” section to the rover failsafe wiki page.
Hope that helps, if anybody bumps into problems we should be able to work it out.
Here is the link to the part of the rover documentation that describes battery failsafe.
http://ardupilot.org/rover/docs/parameters.html#batt-crt-volt-critical-battery-voltage
It is not I am looking for feature. I want that the rover can be charged when the battery low on auto mode. The designed rover is running 24/7 by automatically charging dock.
And I cannot find out Enable Continue with Mission Plan option in failsafe setting. How to let rover runs without transmitter or transmitter power off in auto mode.
Enable Continue with Mission Plan option is gone too.
lumono,
Enhancement requests can be added to the issues list.