First: The Preamble. First-time quad builder using a S500 frame, H.K. Multistar 2216 800kV motors, H.K. Multistar 33A BlHeli_32 ESCs, and a Holybro PX4 2.4.6, 32-bit. and a X4R-SB. Yes, some parts are archaic, but it was a box full of new parts bought some time ago that did NOT get assembled because all kinds of ‘life’ happened (not the good kind)
I followed many of the typical YouTube build-alongs - Painless360’s, Blue Falcon, etc, and got it built, than after several days chasing down all the problems you encounter (that they don’t tell you about in the videos) was able to get to a maiden hover. That was fun and exciting, BUT…then I started having issues with Mission Planner and some failsafe settings that seem to have a mind of their own…
Under ‘Mandatory Hardware’ —> ‘Initial Tune’ I change the settings to a 10" prop and 3S battery keep 4.2v & 3.3v and click ‘Calculate Initial Parameters.’ I ‘Write to FC’ (which is Connected) and then go out to fly.
All the voltages are wrong and I am unable to arm because battery 1 voltage is too low (I have Yaapu telemetry installed on my QX7). Plugging back in MP has reverted to a 9" prop and FOUR CELL batt (instead of the 3000mAh 3S batts I am using). All the numbers are wrong and it won’t arm. I re-set it and it doesn’t matter, MP keeps reverting to the wrong data.
If I had hair left I would be tearing it out right now. Anyone have any ideas…?
The Initial Parmeters calculator DOES NOT read your existing settings before it runs, so it always defaults to 9" and 4S.
If you did put your settings in again and write, you would likely see it has nothing to change.
We can certainly help with other issues too.
If you can download a .bin log from the pixhawk, upload it to a filesharing service then provide a link here, we can have a look over and see what might need some alterations.
Also mention what sort of issues you might be seeing specifically, or what things you want to improve - we can usually tell anyway
You are only supposed to do “mandatory initial tuning” once and only once on a vehicle.
If you do it again it will probably overwrite values that you do not want to overwrite, like the battery and FS options.
Thanks, everyone, for the responses. I wish this was something noted on the page, it would have saved me a couple days chasing my own tail, so to speak.
But, now, in keeping with my general frustration, last night I connected and made certain that everything appeared was set and working correctly for some flights this morning, including making certain that my TX and 3S 3000mAh were charged and reading properly in MP as well as my TX telemetry and made certain the copter armed with no error messages - everything was perfect. Went into the backyard this morning excited to fly and… “PreArm: Battery 1 unhealthy” [12.5v and balanced cells per battery checker]. Swapped batteries - same thing.
Literally, nothing changed, and yet it went from perfectly healthy and ready to fly to unflyable in 10 hours. ‘Battery Monitor’ still indicates a fully charged, healthy battery. This is how it’s been for over a week - one thing after another. Also, none of the low-voltage warnings are working, I fly it (usually around 7 minutes) and only know the general condition when the quad starts acting squirrely and unstable and I land it (even though the Yaapu says I have only used 25% of capacity). Despite having been set up I don’t think any of the Failsafe options are actually working.
I realize that resetting the ‘Initial Tube Parameters’ may have changed other settings (if so I don’t know what those might be), but I can find no documentation as to the exact process - “First do A, then do B, then do C and check against step D, then move on to E, but do not change previous steps you you need to restart the process…” There are a lot of gaps and assumptions about the knowledge base of people new to the hobby…
I have 40-years of technical background as an aircraft mechanic and a recording engineer. I’ve had computers (and built most of my own) since the Texas Instruments TI-99 came out. I’ve played in R/C for a couple decades and design & fly high-powered rockets. I’ve done some designing of basic electronic circuits (until the math finally stopped me) but still enjoy kits. Perhaps not having grown up with a game controller in my hand or having programming options for high school school electives is finally catching up with me, but trying to - successfully - build and fly my own drone is kicking my ass, and I’m not used to that…
Though it would not arm I believe these are the appropriate files.
Your battery failsafe settings are all correct, dont change them.
The problem is your current and voltage sensor config.
Change these:
BATT_CURR_PIN,3
BATT_VOLT_PIN,2
and reboot the flight controller.
I would also redo the voltage calibration, just to be sure.
Connect a battery that is already discharged or maybe on storage charge. Measure it’s voltage with a digital multimeter.
If you have an adjustable power supply even better - set it to about 9 volts and accurately measure that.
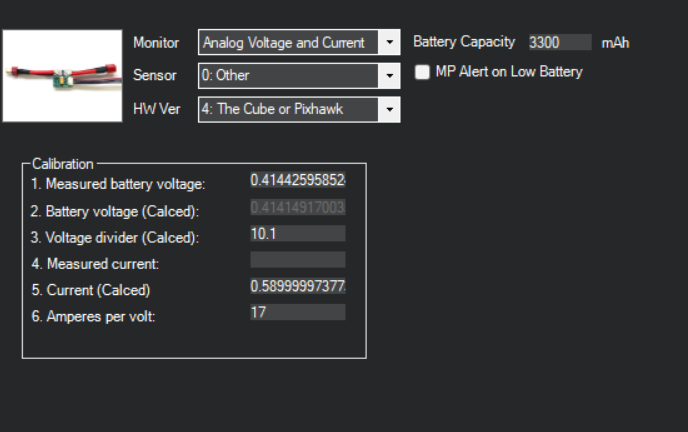
The HW ver should be “The Cube or Pixhawk” like in my image
You have to set the Sensor to “Other” in order to accurately adjust it, otherwise persist with the default values.
Now set that value in “Measured Battery voltage”
Reboot the flight controller after any changes to current and voltage sensor settings
Unrelated to battery issues, but for general tuning and operation you can set these:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_BW,45
INS_HNTCH_FREQ,90
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,0.14
then try another test flight, mostly hovering, then provide that .bin log
I appreciate you for taking the time to help and advise.
I did a deep dive into past posts of the same issue and finally caught the discrepancy. I had one source of information, from somewhere, I’ve forgotten, that had me using PX4 for my FC model, and one using Pixhawk1, so I believe that is where I entered the incorrect settings. Also, despite the fact that I have a Holybro power module (model unknown, but it is an older model w/o the cap) using that setting seems to cause issues, as well, but ‘other’ seems to be working fine. If it ain’t broke…
I was able to get in two test flights (before I read your kind response) at hover, but oddly enough, despite all the FS settings being set at 10.5v it did an RTL at only 11.5v making for a short flight.
I will make and write the setting changes you have suggested, and weather allowing, hope to have the results then. I do have an adjustable PS so I will try that method of setting the voltage divider.
Thanks, again, for your assistance; it is very appreciated.
I use an adjustable PSU to calibrate the voltage sensor at a low voltage, down around where you would expect a battery failsafe, or lower. This is the region where we need the voltage reading to be most accurate.
Calibrating at a high voltage (full battery) is not as useful, unless you know for certain your voltage sensor is perfectly linear
This is my first drone, so I’m not certain what to expect in terms of power consumption, though it’s pretty self-evident that with four (2216-800kV) motors (instead of one in a fixed wing) the battery is going to exhaust itself pretty quickly. As I said, it seems that around 11.3-11.5v (3-cell 3000mAh) the drone starts to become unstable so I typically set the battery fail safe (RTL) at 11.5v. I guess my question is does this seem typical? Because I really don’t know.
On this particular flight (all hover) I set the Battery FS at 9.5v but at about 6:30 mins/elapsed and 11.3V it began becoming unstable and I immediately landed. I’m thinking that, if I ever want to do an Autotune routine I am going to need at least 5000mAh batts.
I have been away, working, etc., the last day and a half but will do the low-voltage calibration and report on that.
Below is the .bin for the hover flight after the settings you suggested above. Earlier in the day the flight was short as it was gusty beyond my confidence to fly successfully, so I waited until the evening calm and it flew very nicely. I did not try any maneuvers other that keeping steady in hover.