Can anybody direct me to where in the Rover documentry this is covered in detail as I cannot find it.
Here you go, -
http://ardupilot.org/rover/docs/tuning-steering-and-navigation-for-a-rover.html
http://ardupilot.org/rover/docs/parameter-meanings-and-tuning.html
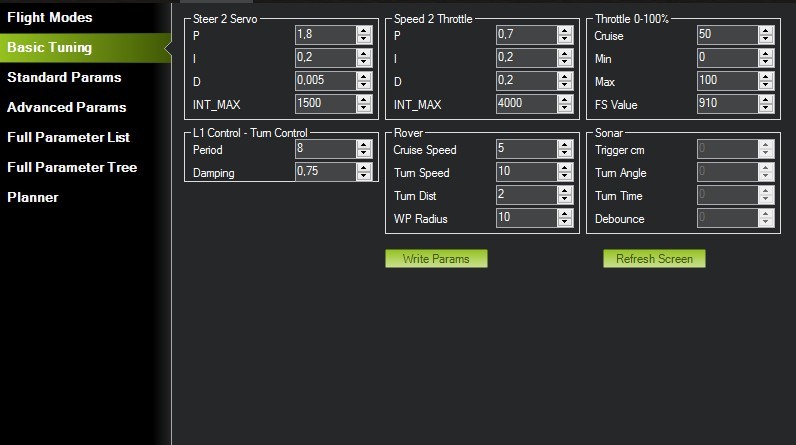
Everything that you can change in the basic tuning page ultimately changes the parameters.
Thank you Nihal, unfortunately that does not explain how the craft behaviour will be affected at one, high speed, and two, low speed.
This is what I want the boat to do:-
1- travel in a relatively straight line between waypoints at a speed of 4-5m/s
2 - when corrections are made while heading to these waypoints, they should be quick but small corrections (as one would do when steering a real boat at speed)
3 - when the boat approaches a waypoint, it must slow right down (max=1m/s) early enough that the momentum of the craft is brought right down BEFORE reaching the waypoint
4 - the turning can then be quite radical as the speed is low, but must have an accuracy of max 7m to actual waypoint
5 - leaving the waypoint, the throttle must increase gradually so time is given to get the correct heading to the next waypoint.
Is this possible with Mission Planner?
Anybody? …