I am flying roughly the same setup (Upgraded to Discovery Pro after the crash though), with another radio and TBS motors. Basically you calibrate all the sensors/ESCs/radio, and it works. Autotune will do the rest, but the single battery may not last a whole session, so you may need to do one-two axes at a time.
Oh, almost forgot, what flight controller do you use?
You specified different brands of transmitter and receiver. Do you have the FrSky module installed in the Turnigy? If you have successfully paired your TX and RX, the next step would be the radio calibration in MIssion Planner. It should be a pretty straightforward step-by-step guided process (I have no Windows, therefore I’m using APM Planner 2 instead of Mission Planner).
The default PIDs are flyable, but an autotune will improve them. The wiki has lots of info on the whole setup process: http://ardupilot.org/copter/docs/initial-setup.html
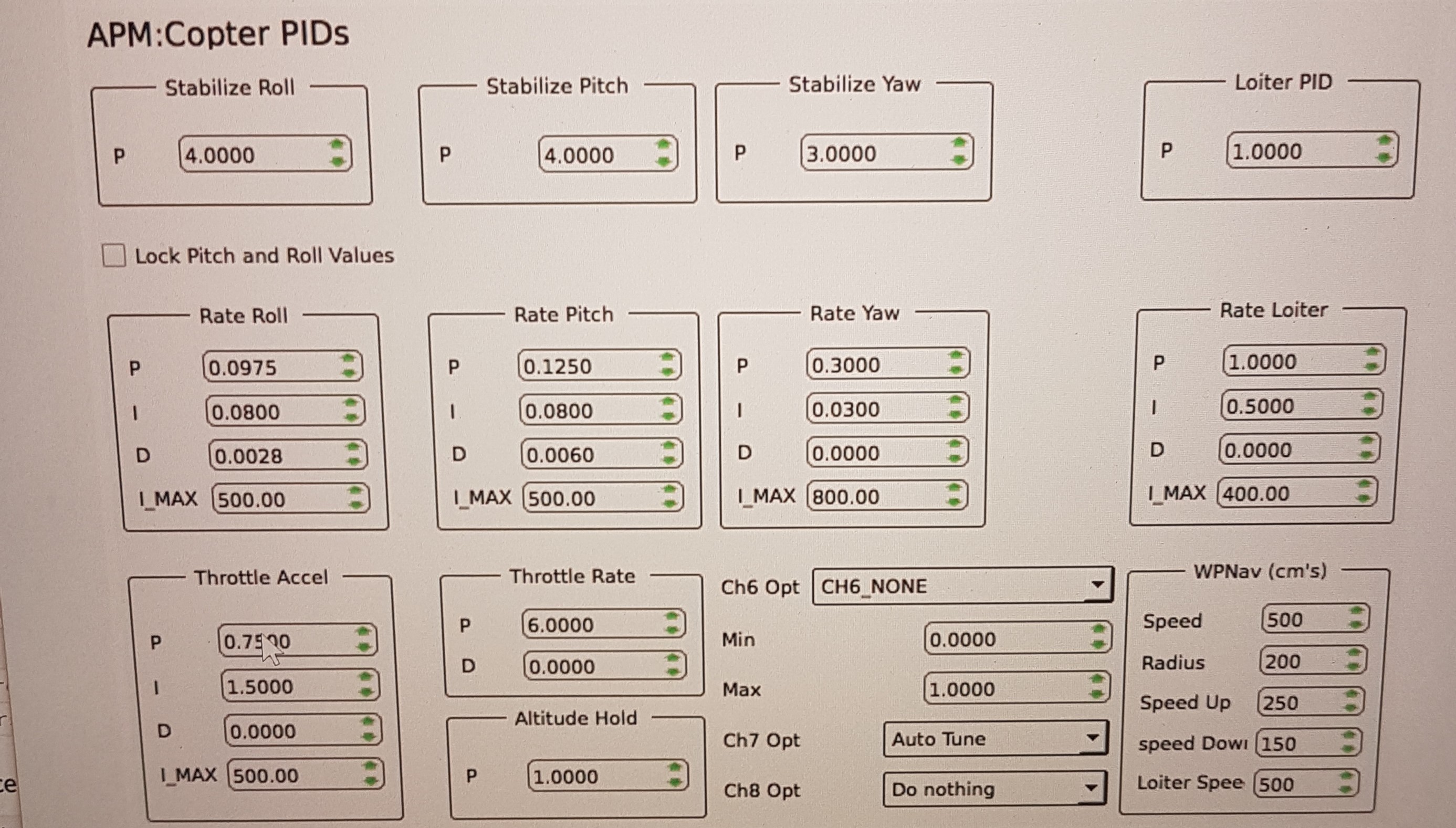
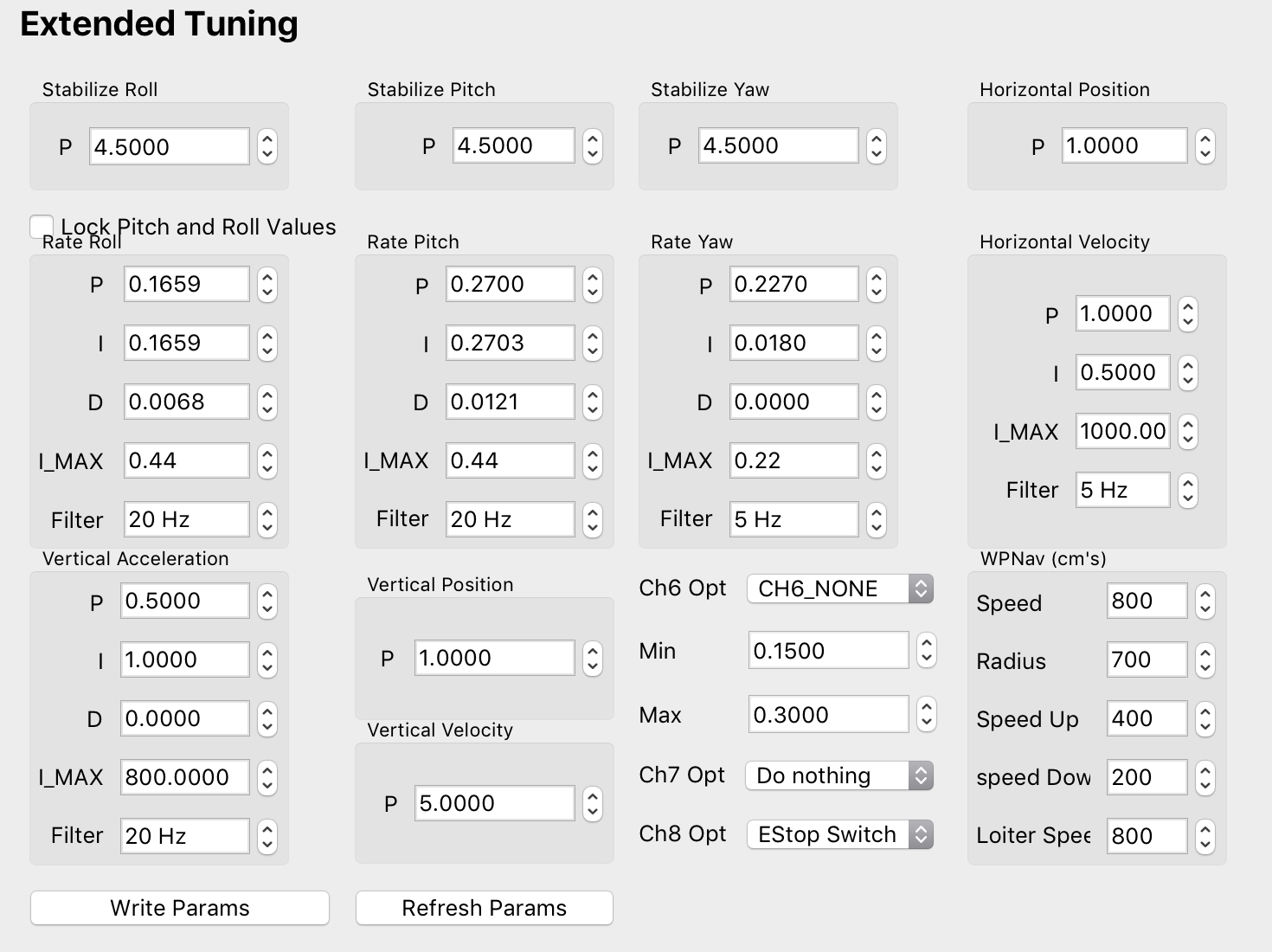
Sorry, I am of not much help in manual tuning. The only thing I adjusted manually is Rate Yaw P, because the yaw was too sluggish. Here are my current params:
Please note that my copter has more equipment on it, so it is pretty heavy. The same parameters could make yours feel very twitchy, or even oscillate. I still recommend using the firmware’s default parameters for first flight, and then run autotune sessions for all 3 axes on a calm day.
After you get it flying “Locked in”, i.e. flying smooth, no twitching, keeping it’s position in the wind, no overshooting etc., have a look at the RC_FEEL_RP parameter to tweak the way the copter responds to your inputs if you plan to fly by hand a lot.
Does anybody know how to setup the OSD in the FPV Google’s correctly?
I am using Quanum FPV Googles.
Also:
My flight mode Switch on the Transmitter does not Change the Mode. Do I have to change them on the Transmitter or in Mission Planner?
I am also using two different Batteries : 4S 3000mAh and 4S 5200 mAh. The preset in Mission Planner is the smaller Battery. Do I have to Change the Settings after every Battery Exchange?
And on the battery setting. i am assuming you are referring to the battery capacity setting where you enter the mAh value. It’s used to calculate when FS needs to kick in(and some other things), so yes, you will need to adjust it when you switch from a larger to a smaller battery. Or you leave it at the lower setting (not leveraging the full capacity of the larger battery). There is no way around this - unless with smart batteries - the system cannot know how much capacity the battery has - you need to tell it. My solution to this issue - always use batteries of the same size - then you don’t need to worry about it.