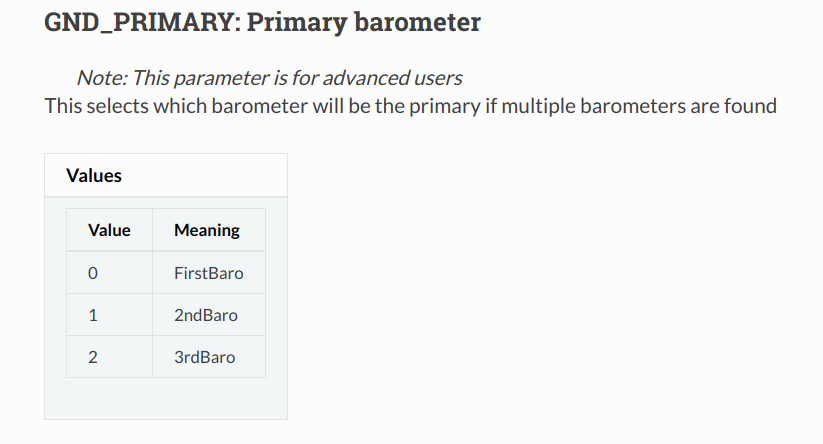
If I want to make the Baro sensor in my CAN GPS primary, is it as simple as picking the third Baro? In my case I am using a Cube Orange with 2x5611 Baro sensors and then I have a third in my CAN GPS (5611).
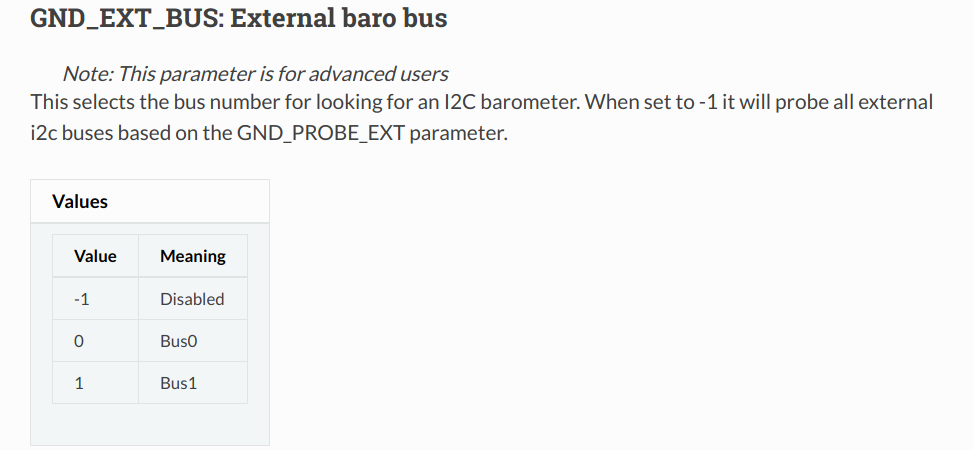
GND_EXT_BUS: External baro bus only mentions I2C buss’s and not CAN ones
Also as far as enumeration of Baro sensors. I know it had been talked about, was anything ever coded for it? I would like to see something similar to how Mission planner shows the compass’s and their order.