I am using Cube Orange + copter 4.0.7.
In this recent flight test, at landing phase in Loiter mode, when the drone was at 50cm height from ground, it lost its height and fell to the ground (no damage!)
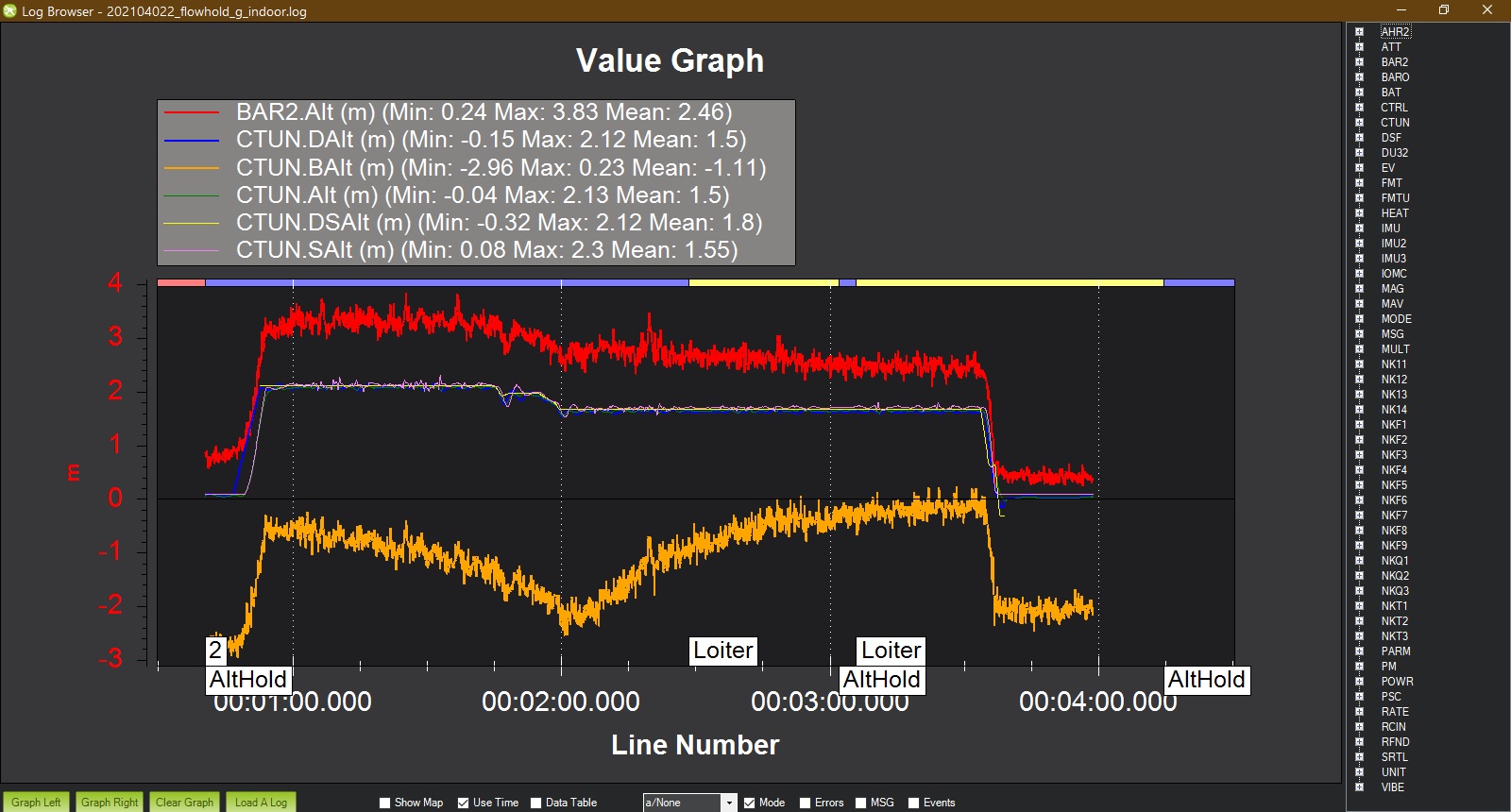
I check the log and see that barometer was dropped right before the impact.
Hello @andyp1per, thanks for your reply.
50cm is estimated from the end point of landing leg to the ground. So in the log, you can see that the height calculated by the barometer decreases sharply (which is not desired by the by pilot).
I am not sure what you mean by “blip off” (sorry for my English) but I have never experience this situation before.
More information: my Cube is inside the cover box with 1 6mm diameter hole only.
Hope that you can advise.
Thanks,
Vu.
I have to say it looks like ground effect to me - you get the same pattern at takeoff, but you are right baro inside the cube should be largely unaffected.
We experience drone oscillating (up and down) suddenly in Loiter flight mode outdoor. Hope to get a solution to this problem. we notice barometer values can go below 0, far zero and fluctuate badly.
Just test it in AltHold mode to observe. Let’s apply some roll and pitch with >= 4m/s. If this did not happen in AltHold or any non-GPS modes, go to Loiter again and check if reducing these parameters a half will help or not: PSC_POSZ_P and PSC_VELZ_P.
EK2_ALT_M_NSE was 3 previously and experience height drop when roll and pitch. I increased to 5 and the height is much stable when roll and pitch. we do not experience hover hold issue all along after tune using autotune.
with the same parameters, did a retest outdoor hope to repeat the problem.
Also to see if we need to reduce PSC_POSZ_P and PSC_VELZ_P by half.
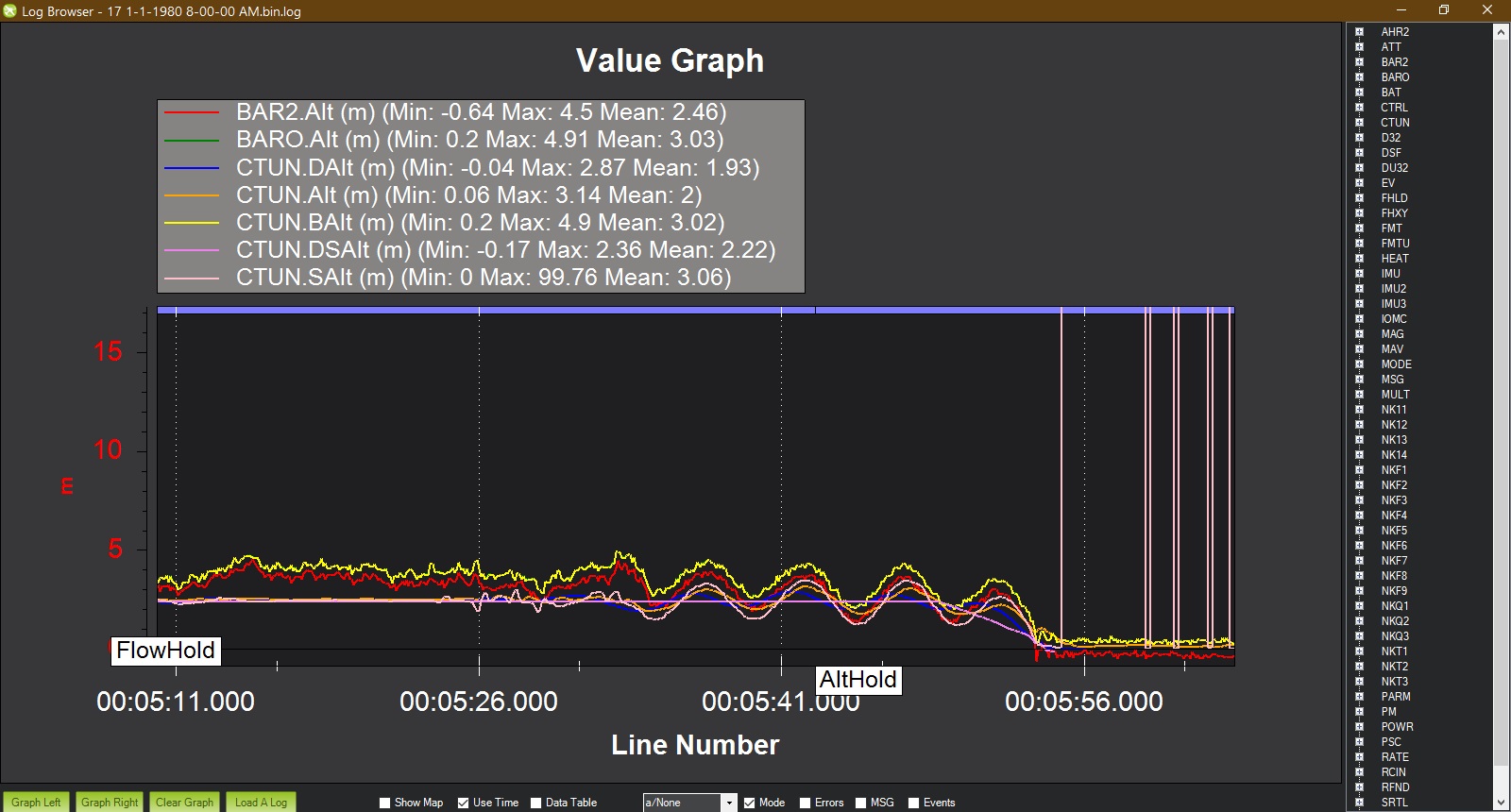
Not manage to get the up and down oscillation in Loiter flight mode but in FlowHold flight mode. Once oscillate, I have to quickly find the descend timing to land the drone.