I am using a dual motor non-vectored tailsitter for indoor flight (no gps) and I am facing a rather strange issue with the barometer in latest stable Arduplane.
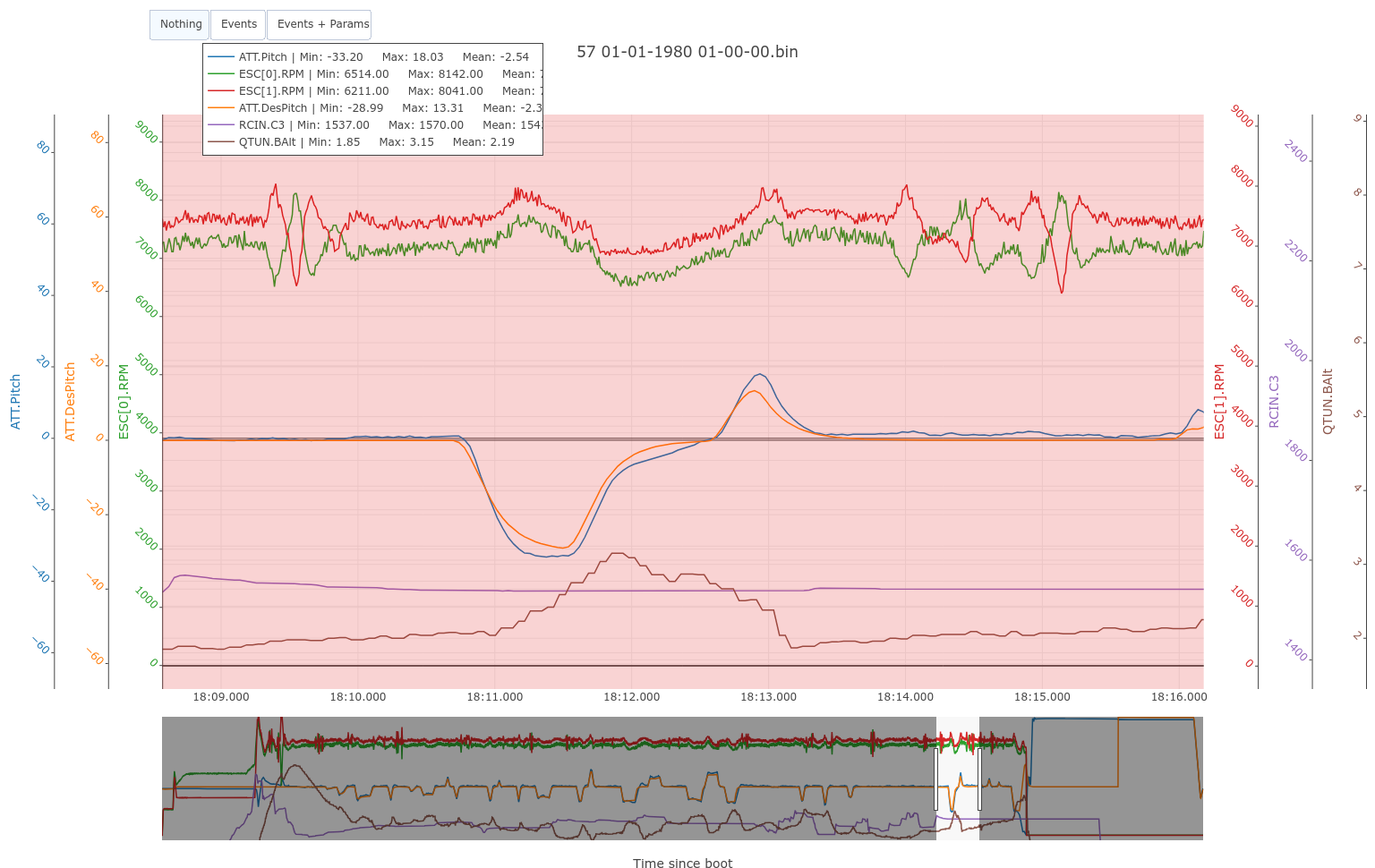
When pitching the Barometer Altitude measurement changes significantly. For example in the picture below it can be seen that the altitude increases about 1 meter when pitching down. Pitching up has the opposite effect, the altitude measurement is decreased. By observing the flight myself, I am sure that this did not happen. Furthermore RCIN.C3 (thrust stick) was constant all that time.
Is this normal since I am just using the Barometer for Altitude and not the GPS?
Could the ground effect be the reason for that? I am flying 1-2 meters from the ground.
The problem that occurs with that behavior is that the motors rpm are decreased (since the altitude seems to have increased) and the plane loses pitch authority.
you will get all sorts of baro issues trying to fly indoors, as it starts to move all the air in the room it will struggle to hold altitude. You need a rangefinder for it to hold a distance from the floor.
Thanks for the recommendation. On the one hand this makes a lot of sense but on the other hand the behavior was not a random one that could imply weird airflow disturbing the barometer. Every time I pitched down the baro gained altitude and when pitching up, it decreased for about 1 meter.
My intention is to fly outdoors eventually, I am just tuning the attitude controller inside, so maybe its better to switch to QSTABILIZE. However, I am interested in that since I will use QHOVER in outdoors flight later, and this issue has caused me some crashes already.
It seems tht the airflow round the baro sensor is changing by your pitching.
If not done you can place a foam arounfd your sensor to minimize this influence
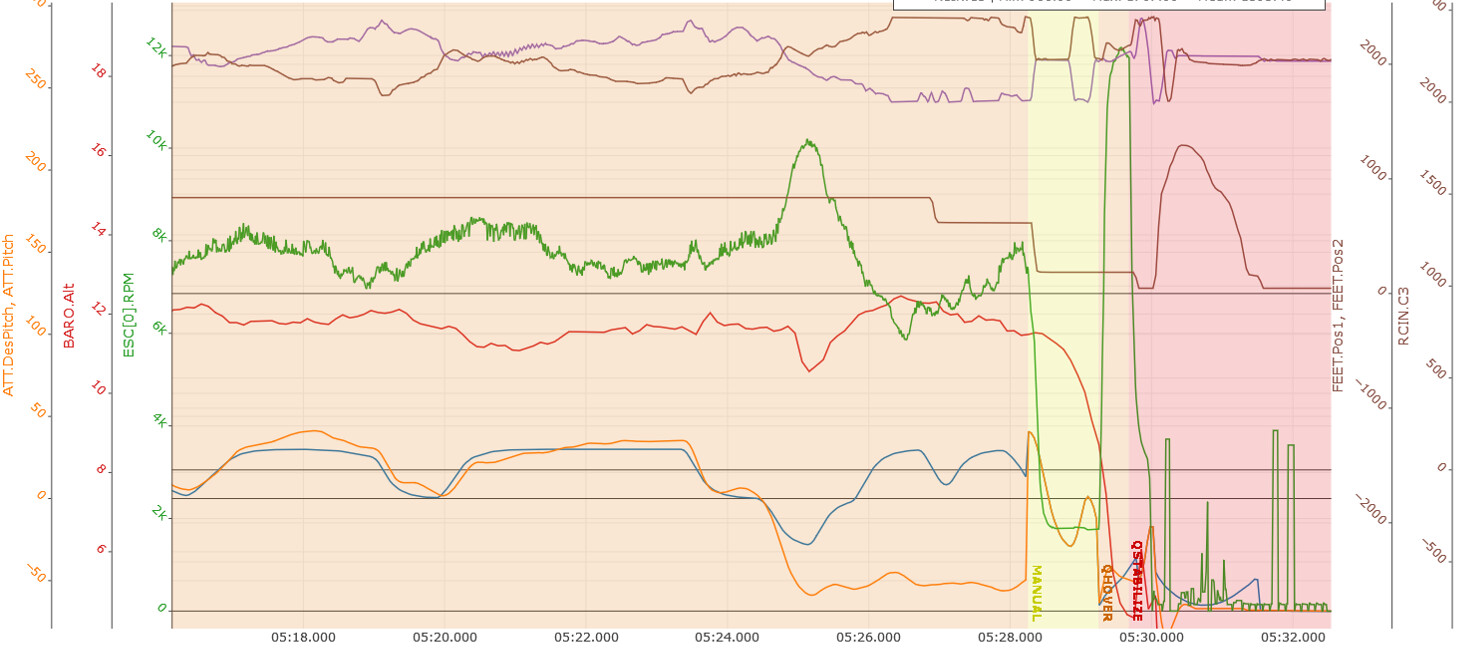
At first I did 2-3 pitch up movements (tailsitter moves backwards) and the response was ok. Then I tried pitch down; it went too far (~ 50 degrees) and couldn’t recover.
To my understanding QHOVER control worked correctly this time (in contrast to the indoor case) but recovering from -50 degrees seems impossible. Do you agree?
Any ideas on why there was such a big overshoot on the pitch down?