Maiden flight with new Pixhawk. Good take off is Stabilize. And then at about 10 feet I switch to AltHold and the copter falls… It sort of bounce but stay upright so I switch back to Stblz and throttle up… and get back in the air… Switch to Pos Hold and all was ok after that…
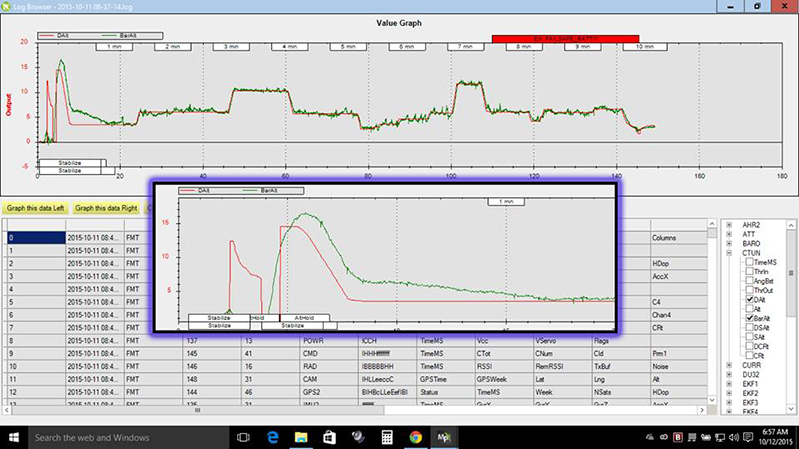
You can see in this snapshot of the log that DAlt and BaroAlt are not in sync at the beginning of the flight but soon come together.
Did I not wait long enough before take Off to let the baro stabilize?
I did find two motors out of balance… Took all of the props off and re paired them up by weight. These CF props can vary as much as a gram… Also put on all new nylon washers… I will eventually zero them in more perfectly by adding weight to the lighter of the pair at the C of G point… In doing this I realized how great it would be if a developer would create a small app to spin up the motors to 25% or so one at a time and record vibrations and report it all out chnl by chnl… Seems a simple little but of coding…
Same thing happened to me with my APM. Log files showed Baro errors…had to select ERR for this to show on graph. I opened the APM and the little piece of foam covering the baro slipped off. Moved it back and taped it and problem solved.