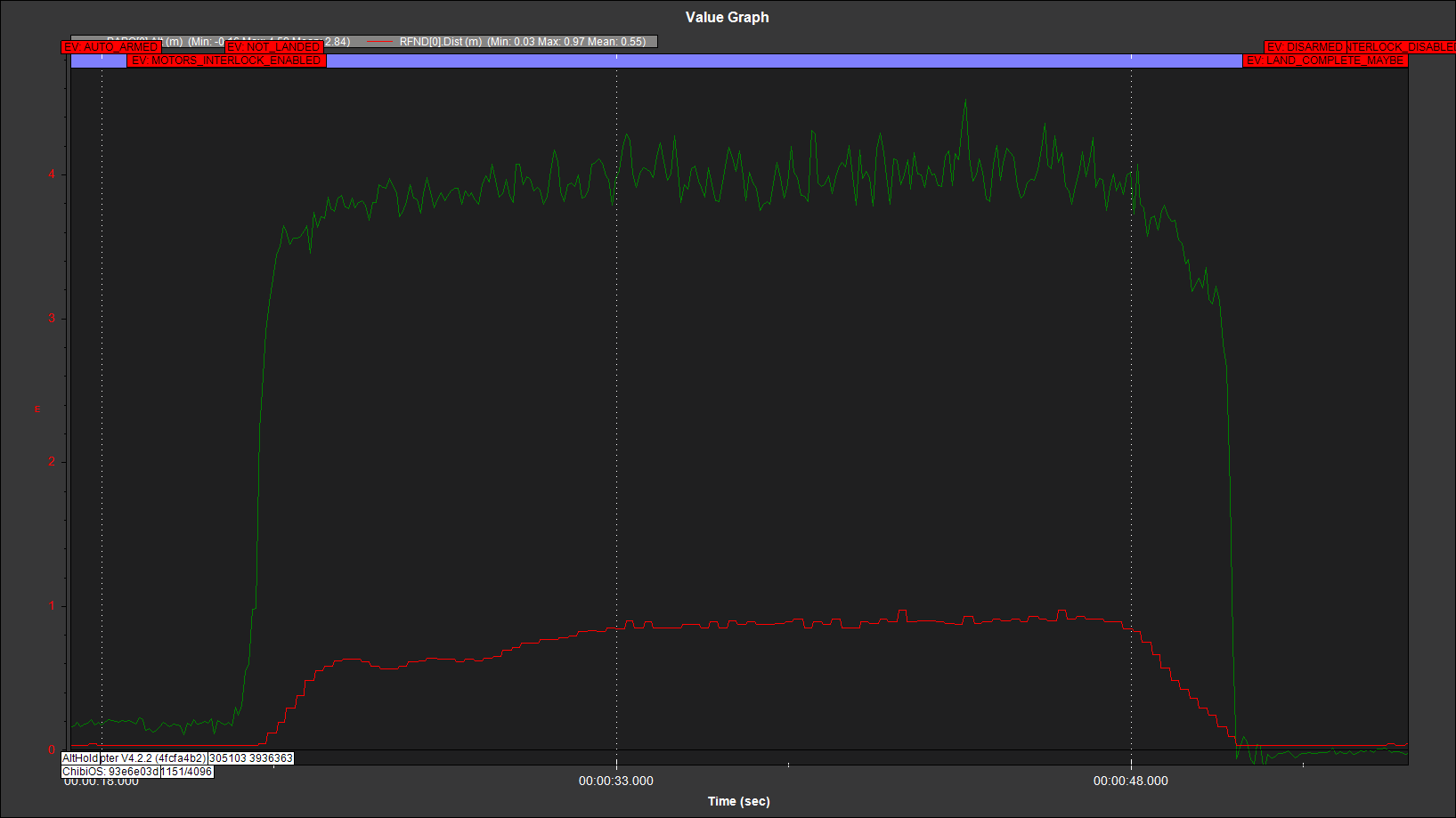
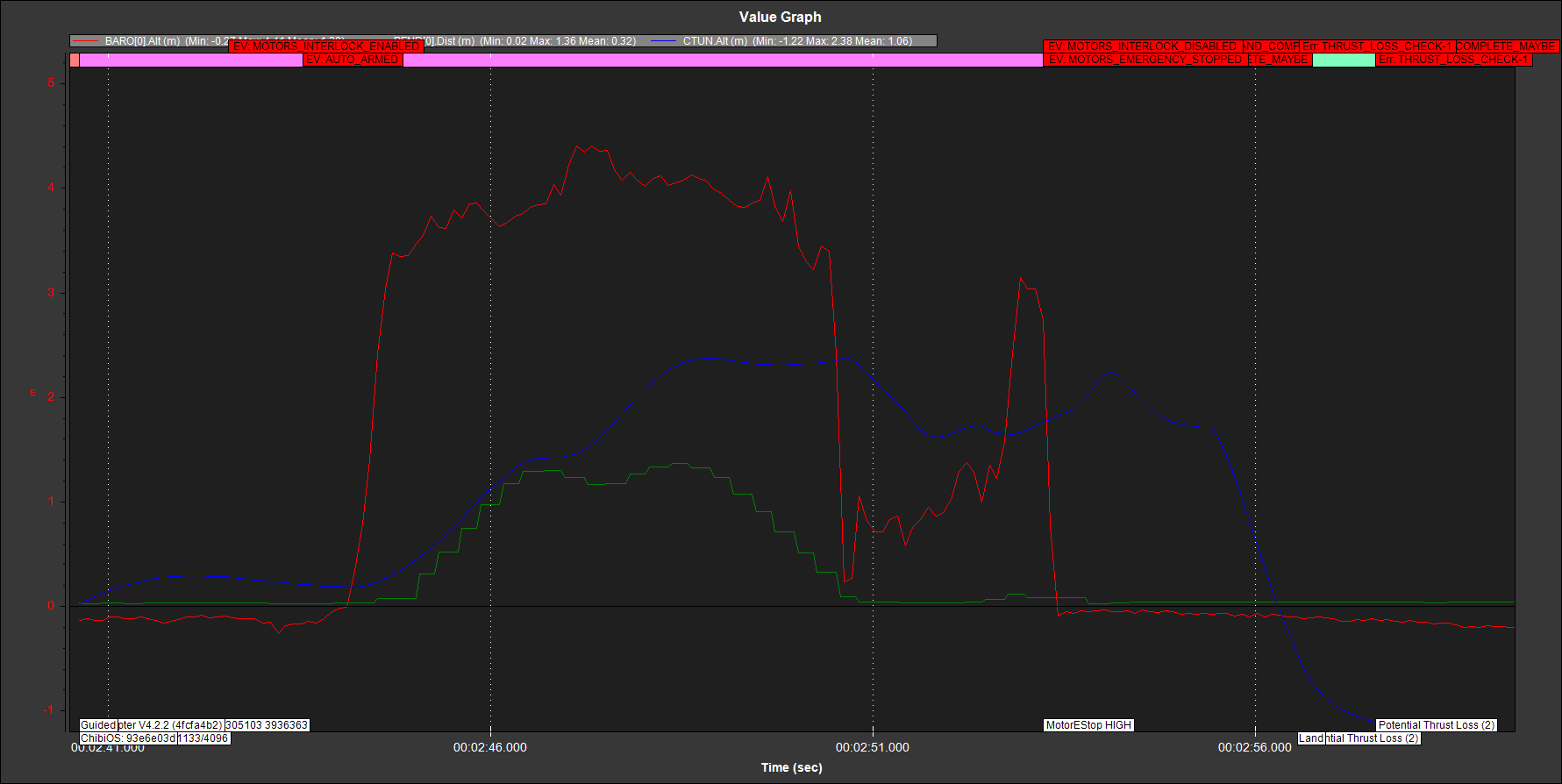
The barometer always shows a larger value.
Lidar appears to be correct.
As a result, ALT of CTUN is an abnormal value and the aircraft flies away or clash.
Can I calibrate baro?
Or, can I use only lidar for EK3?
The barometer always shows a larger value.
Lidar appears to be correct.
As a result, ALT of CTUN is an abnormal value and the aircraft flies away or clash.
Can I calibrate baro?
Or, can I use only lidar for EK3?
Hello @hi6otb
Maybe I am not the best person to help you, but most probably your barometer is suffering effects of prop wash on it.
No, they come pre-calibrated in most FCs.
From what I now, this is only recommended for indoor flights.
Posting your logs and giving more details/pictures of your aircraft may help.
I use only indoor and fast surface.
So, I want to use ONLY LiDAR for Althold mode.
Update to ArduCopter 4.3.0 then. It has improved rangefinder height.
@amilcarlucas it has improvements on using rangefinder as primary source of height in the EKF or for using it for surface tracking?
primary source of height in the EKF
Can I avoid using a barometer?
Maybe a barometer is used in the secondary.
Greenhouses with fluctuating atmospheric pressure and temperature have a negative impact on EKF.
Can you upgrade to 4.3.1-rc1 ?
Nice, thanks a lot @amilcarlucas for the information!