i use a standard digital airspeed sensor (with the 4525DO sensor) and a HolyBro Pix32.
MP is 1.3.48 with Arduplane 3.7.1.
First thing i noticed is the airspeed always is around 2-3m/s while ground handling.
Does a little wind can have this effect?
Second question that came up. Does the airspeed sensor have any additional effect on BaroAlt?
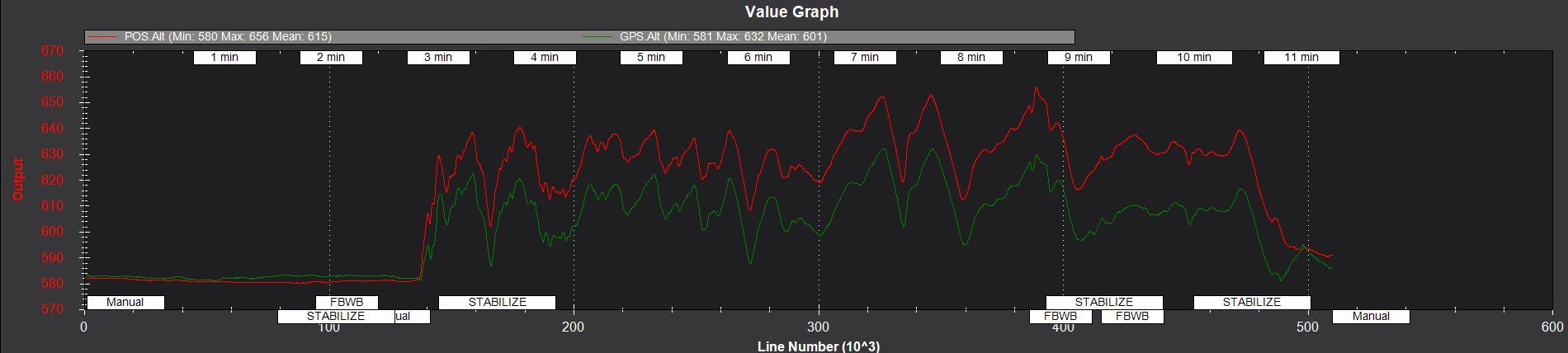
BaroAlt differed by 15m-20m from take-off to manual landing even though there was no noticable weather change in this 5min flight. It was very obvious while flying that the Alt that was brought into missionplanner by the planes telemetry was a lot off (i would say from 20-30m), which is a problem for Automissions.
Hi Alex,
I have read in several posts that a 2…3 m/s reading in the airspeed while the plane is still is normal, and I have verify it myself (I don’t know with which sensor, though). I use to blow the airspeed sensor to check it.
regarding the baro shift, I understand that having an airspeed sensor does not affect the baro readings, however, the baro sensor is very sensible to airflows surrounding its case (and also to ambient ligth), that is the reason that the opening of the sensor have a piece of black foam in almost all autopilots.
A few days ago, a flight of less than 5 minutes ended with a 4 meters of altitude drift, with no noticiable weather change. I think that some drift is always inevitable.
However, it could be also a flaw in the design of the autopilot. I have a “hobbyking pixhawk lite 32” that have very noisy readings of the barometer (+/- 2 meters easily with the plane on the ground). I read in some post that adding an electrolitic capacitor in the PCB could reduce the noise, and it worked for me.
Another option that I want to try is to send from mission planner periodic updates of the parameter GND_ALT_OFFSET from the reading of another autopilot sitting on the ground, to compensate for pressure drifts (it should be done automatically easily, but I cannot find any groundstation that is able to it).
Regarding the GPS-Baro difference, I am not sure, but it could be that the baro altitude is always relative to the home location when arming (zero for the home point), while the GPS could be the absolute altitude from the mean sea level (I am not sure about that, but could be the explanation). Additionally, GPS altitude have usually a large error depending on the place on earth and the number and position of the satellites.
Confirming that 2-3 m/s of airspeed on the ground when shielded from the wind is entirely normal.
Outside of the already mentioned items, the baro is sensitive to changes from temperature changes causing pressure changes. If you armed and took off very quickly after powering the aircraft on, you easily could have been experiencing self induced heating that isn’t be updated while the aircraft is armed/flying around. When baro calibrations are preformed (which is continuously on plane while disarmed) we update the reference temperature for you, but we have to stop doing this once you’ve armed the aircraft.
thanks to your replies i am a little more calm on that topic now.
All you said makes sense to me and underlines my experiences on the field.
First of all i need to mension that i definetely need to re-calibrate everything including the airspeed sensor like described here.
Do you do this as well? And if yes do you do it at every flight day?
Second thing is the temperature dependency of the baro. The pixhawk is mounted inside the airplane. It was a sunny day around 26°C (80°F) and the plane gets heated up on the ground and off course loses temperature during the flight. This is obvious in the LOG and one can not do anything about it, right? But how else can i assure to meet the waypoints then?
Hello Alex,
I think that the best thing to do is wait for the pixhawk temperature to stabilize a few minutes. re-calibration with the “do pre-flight checks” is not needed in principle, as the altitude is set to zero when arming, if the temperature is more or less stable at the moment of arming, that should be enough.
regarding the calibration of airspeed sensor, I have done it only once. I followed the procedure in the web page you mentioned, but it changed the value of ARSPD_RATIO from the default 2.0 to 1.994, so the calibration did something but effect was minimal. I did not repeat it again. I am by no means an expert, but after reading and re-reading the arduplane information, and in my limited experience, I understand that an accurate estimation of airspeed is not critical, only maybe at very large ground-air speed differences due to high wind speeds, and at very low airspeeds close to the stall speed of the airplane.
You made an interesting point regarding the temperature changes. In my case, baro altitude drift is an issue with auto missions with a Maja airplane, which has the pixhawk enclosed with no air flow, so temperature should be more stable. I don’t know what could be the effect of a lower temperature during flight. All in all, I believe that baro drift is a recurrent issue difficult to solve. Everybody mention LIDARs for landing but they are expensive, distance range is not so big, and depends on the kind of ground surface. For me, the best solution could be a simple barometer chip connected by USB or bluetooth to the ground station computer or device for automatic periodic corrections, but, so far, I have not found this solution implemented.
Regards,
Adolfo
I just fly GPS altitude as my primary height source all the time which isn’t subject to baro drift. That’s partly due to the fact that baro drift is a real problem on a 3 hour long flight, and I tend to use L1/L2 GPS units. (I’ve had good results though with a u-blox unit with SBAS in the US for GPS altitude though)
thanks for your input. I see now, that most of my assumptions are correct and experienced also by you.
I will try to calibrate as good as possible and it’s fine for me to have a little gap of accuracy in the end. One will always have that.
I got another good reply from a another guy when i asked people about a rangefinder for wall inspections with my multirotors. He uses a TeraRanger One (infrared up to 14m distance) for automated landings at his fixedwing. Very good and a little less expensive. I ordered one for looking straight forward at a hexacopter. If it turns out to be a good solution i might get another one for the tuffwing.