This capture shows an unsuccessful swarm test indoors with two balance bots without GPS (GPS_TYPE=GPS_TYPE2=0) with wheel encoders and parameters according to this (after “To enable position estimation using the wheel encoders the EKF3 must be used and configured as follows:…”):
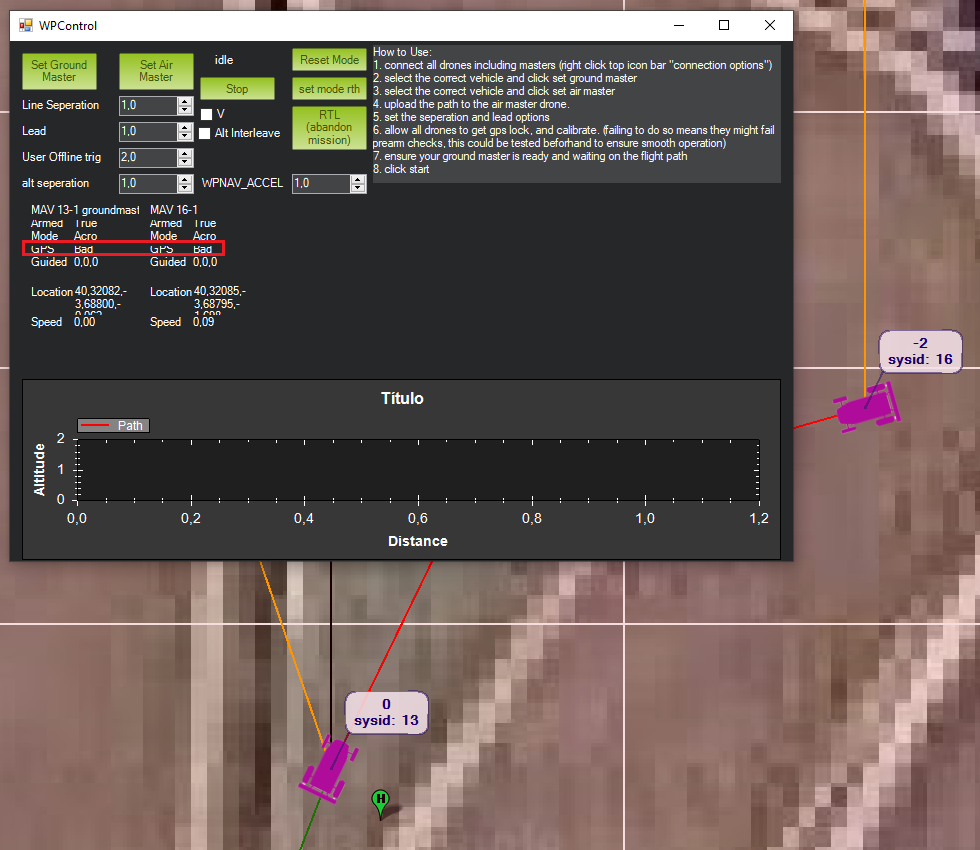
Home position is established with a Lua script, and all movements are relative to it. Even long missions outdoors are possible.
The test is unsuccessful because I am trying indoors in a reduced space, so before trying swarming outdoors with more space, is swarming possible without GPS in this conditions?