Hello,
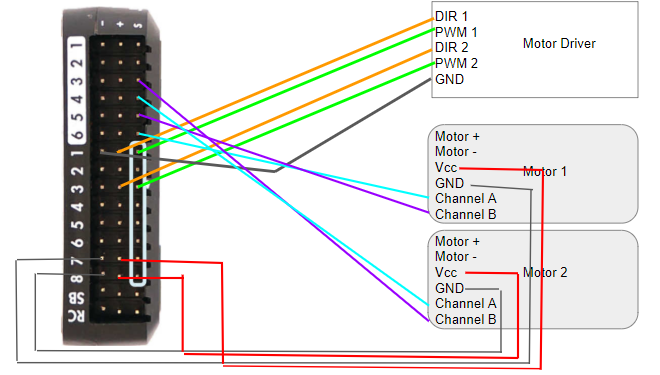
I am trying to build a balance bot. I attached a picture of my wire connections,
Problem: When i connect the battery and try to move throttle sticks, the motor does not rotate. tested my motor driver with the motors without connecting to pixhawk. That works. But I think i don’t have the right connections. Could someone please advise. I can provide more information if needed.
What do you mean by “connect all PWM channels to Pixhawk” ? I have connected PWM1 and PWM2 channels from my motor driver to the Pixhawk Main out Channels 1 & 3.
You need to set MOT_PWM_TYPE to “brushed with relay” and connect the DIR inputs of your motor driver to AUX pins 1 and 2. Then set BRD_PWM_COUNT to 0, so all AUX pins act as GPIO pins. You will also have to set two RELAY_PIN parameters to the correct numbers for the AUX pins the DIR inputs are connected to.
The rover wiki is a good place to start to get info about most setup questions: https://ardupilot.org/rover/index.html