I have a problem with servo working on my bait boat. In the bait boat i are px4 and ardurover 3.5.1.
The ship are two tanks. I send the bait boat in only one point int o one mission. I want to work two servos there, right at the target. I’m asking for help, idea.
What now. I make the mission to the Tower, arrives bait boat in wp, one servo is working 90 degrees and the other servo not. The servo that works - 90 degrees, should go back to normal but won’t go.
I read in the rover documentation that only one DO SET SERVO command can be used per mission. I’m sad.
I already thought about Arduino. That would also need help. I’m a simple driver, but I like challenges.
Thanks for the quick response. I went out to port to test just had a little adventure. A storm came, winds of 150 km / h and overturned the boat.
The boat had to be disassembled, everything got wet.
Will be back. Thanks.
Hello all
the baitboat is fine, not damaged, real survivor.
I read this post in forum.
That’s what I want. Work 2 SERVO in MANUAL and AUTO MODE.
In MANUAL MODE rc function 55 and 56 (5 and 6 servo)
AUTO MODE Arduino Uno control 2 servo.
Only I have Pixhawk px4, not APM.
I would like to make a 2 servo exactly in wp.
I’m think to know what I want.
I only wield 1 wp. I’ll do the mission. Wp.txt contains the GPS coordinate. Pixhawk send this coordinate to Arduino Uno, or Arduino Uno to request coordinate from Pixhawk. When the bait boat arrived the wp, Arduino Uno send command - controlle 2 servo.
If there is another command to send to Pixhawk, RTL.
This is what I would like to achieve.
I can’t program, but I’m very persistent.
Thank you for your patience
Is the ability to control servos limited by the flight mode? If so, is this documented somewhere? I was hoping to control the servos in particular in the following modes: guided, hold, loiter and manual. Manual is low priority since I use the transmitter anyway. Auto I find is better used for mapping missions only (I also use ardurover in a bait boat)
I didn’t have time to get a boat on the water. So there is no log file yet.
I read the servo commands, but when anglers I can’t carry a laptop so I can’t use the MP.
I’m using the Tower. I didn’t see the REPEAT SERVO command in the Tower.
Tower cannot be a wp 2 servo command. This is the problem.
When i go to water i make a mission in the tower and put here and the log file.
Thank you for your patience.
SET_SERVO in Tower works between 2 WP.
Not very accurate, you need to work on change speed and brake.
I want to use brake before wp where it needs to be emptied. But how the servo works is good.
Thanks for your help.
Servo 5, 6 work when i swich Auto mode from Tower and from RC, but not in Manual mode.
To do this, you must rewrite SERVO_FUNCTION 55 and 56.
There is no script for this that I can run from the Rc10 option?
@ddrram2, you’re right that we don’t have an auxiliary switch function for changing servo outputs. We do have the “passthrough” (i.e. set SERVO6_FUNCTION = 59 (rcin9)) but in Rover-3.5.1 I don’t think this will work well with the do-set-servo. In Rover-4.0.0 it will work though. Rover-4.0.0 should start beta testing next week.
Hello Randy, thank you very much for your help. Everything works the way I wanted it to.
There is automatic emptying and there is manual emptying.
I use the beta 4.0.0-rc1 firmware.
Very super.
I wish you all the best.
I have only one question to ask, in fishing we strive for accuracy. It would be good to have 2 or 3 servo work in one waipoint at a time, simultaneously.
It would be nice if you do not need blank wp in the SET_SERVO commands.
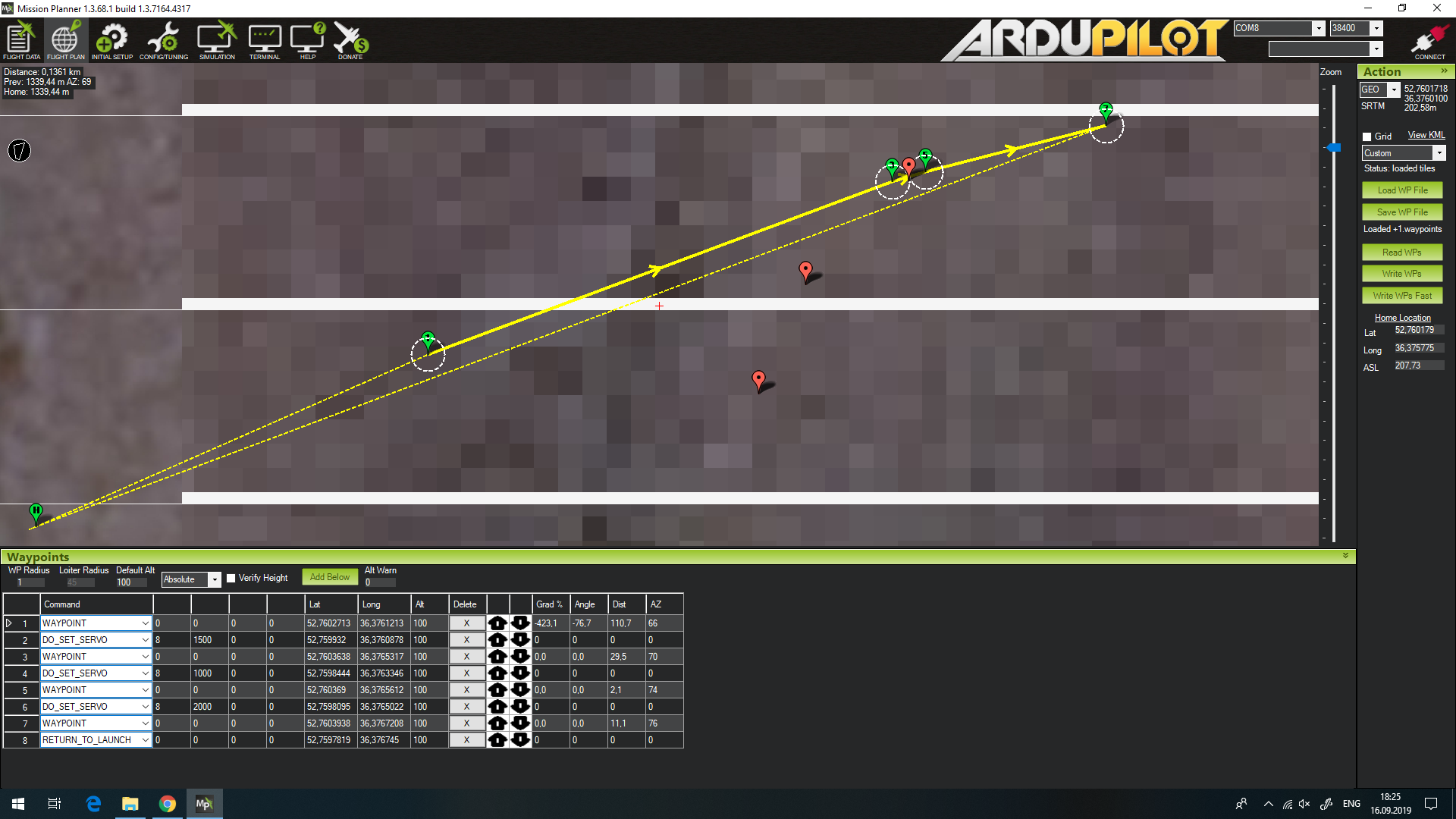
Now is that in auto mode need 9 waypoints in a one waypoint mission, with the same coordinate:
1wp is waiting for 5s,
2wp set servo 5-2000,
3wp wait 1 sec,
4wp set servo 6-1000,
5wp wait 1sec,
6wp set servo 5-1000,
7wp wait 1 sec,
8wp set servo 6-2000,
9wp rtl.
This is a novel, ha ha ha and not so perfect. How wonderful it would be if you just went to the waipoint, stop, give the fish two containers of food, the container will close and come home.