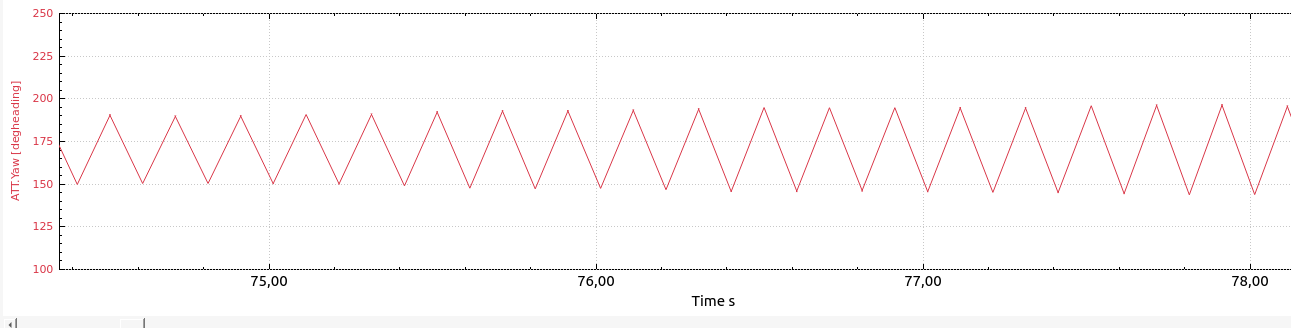
The copter oscillate about +/-30° yaw from target heading at a rate of about 60°/s (based on animation in map module)
Why ? I have never seen that before - did something about the model change recently?
Can you get a .bin log from such a flight, upload it to Dropbox or somewhere similar and post a link here.
Here you go 
https://drive.google.com/file/d/19oHUnHQ-d47fOSlNrxa6YtmKKBIbQl6c/view?usp=sharing
Short story:
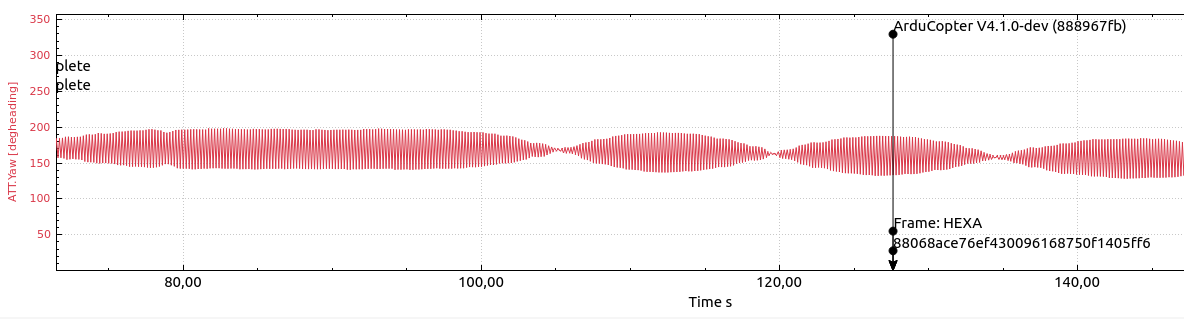
in worse than the map widget could animate.
Also, quite improbable perfect sawtooth with varying amplitude: