I am finishing build and doing some test flights, I think I’ve eliminated vibration to the point that’s acceptable.
But I’ve noticed really bad twitching that almost made my crash, kind of like one of the motor was loosing connection ?
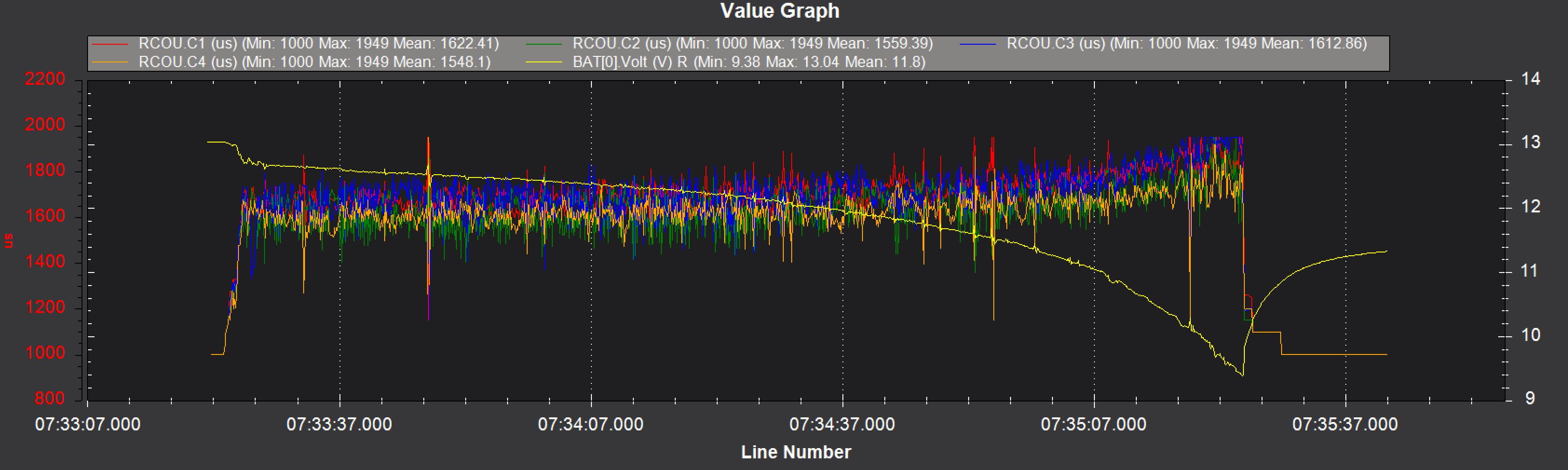
How can I diagnose that from the log ? I can’t see anything obvious wrong.
I know battery was not fully charged, but I’ve seen that even when it was fully charged.
Side questions, Why I wasn’t able to switch modes to GPS modes? I am assuming it was due to GPS not having correct positions, but then, is there a way to prevent arming, until GPS is ready for those?
FENCE_ALT_MAX,120 <- set for safety and local laws
FENCE_ENABLE,1
FENCE_RADIUS,600 <- set for safety and local laws
FENCE_TYPE,3
This will make you wait until home position can be set before arming.
This craft is underpowered/overweight and when your battery has sagged to <10V there is insuffient thrust to fly with all motors commanded close to or at Max.
Right, it does seem to be an intermittent problem with Output 1. which with your motor order is motor 4. Then the opposite arm motor is dropped to compensate.
While you were typing, I just discovered that ground came out from connector to ESC but on motor 3.
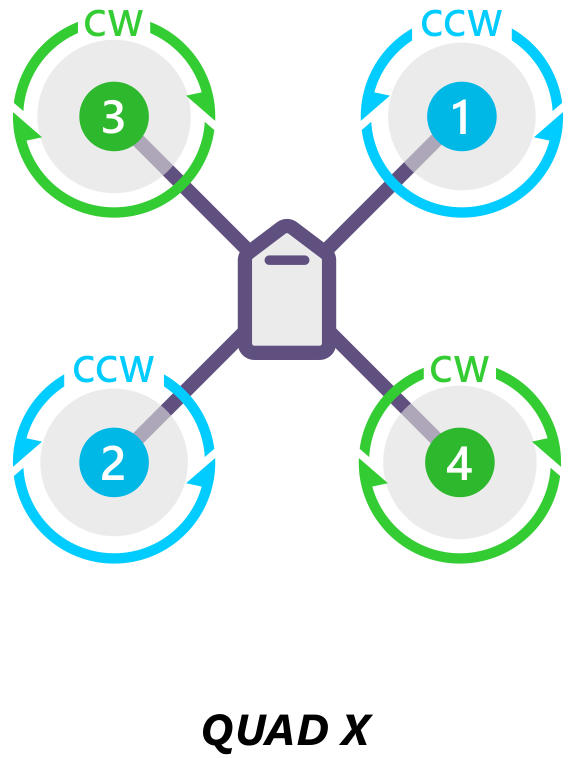
I have different ordering of servos vs motors I think.
But order on the graphs should still apply as
4 1
3 2
Or not ?
Either way that seems like it could be an issue, but it doesn’t really match ordering.
Re-solder all of your esc cables, because on an aircraft that weights that much, if one motor disconnects it would not be able to compensate and will straight fall to the ground (happened to me personally on a drone that weights 2kg).
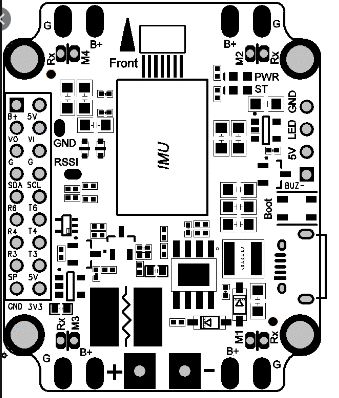
You do have different ordering but not a big deal. I suppose you did that because of how the ESC is oriented with the outputs to arms? Many 4in1’s for example have Betaflight motor order.
Not sure why is that, as I have Kakute F4 V2 AIO, it already forces order of ESC’s, so I did it that way, but that seems to be different to what’s programmed
Actually when I look at the drawingand naming, it makes sense now