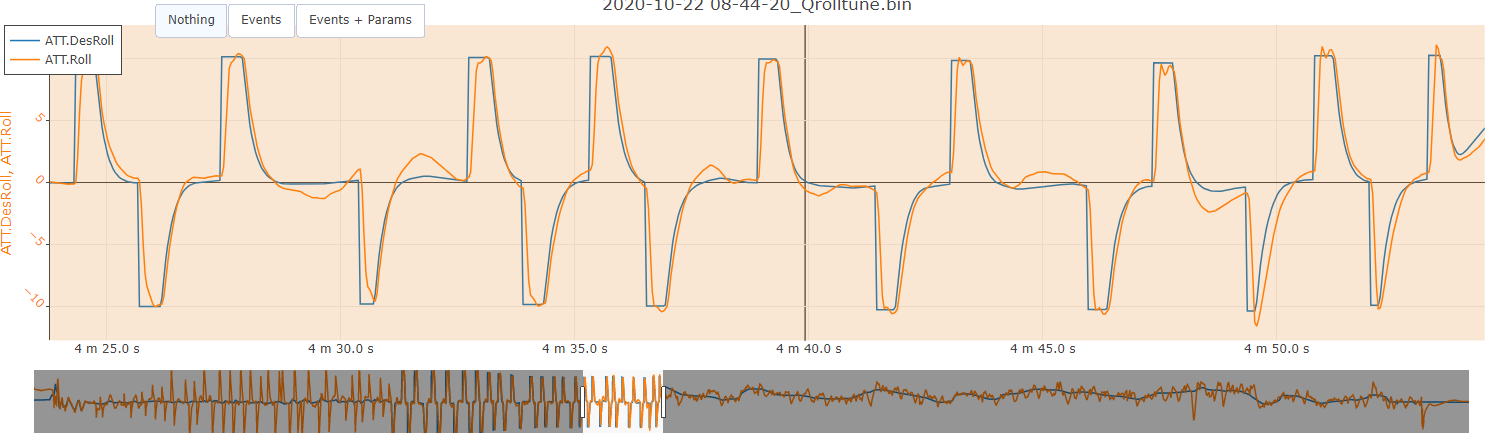
Qautotune cant deal with the slower response you get from tilting motors. The ideal PIDs for such a setup are quite different from those of a equivalent ‘copter’, so Qautotune struggles. Roll works well because a TVBS is essentially a copter in roll.
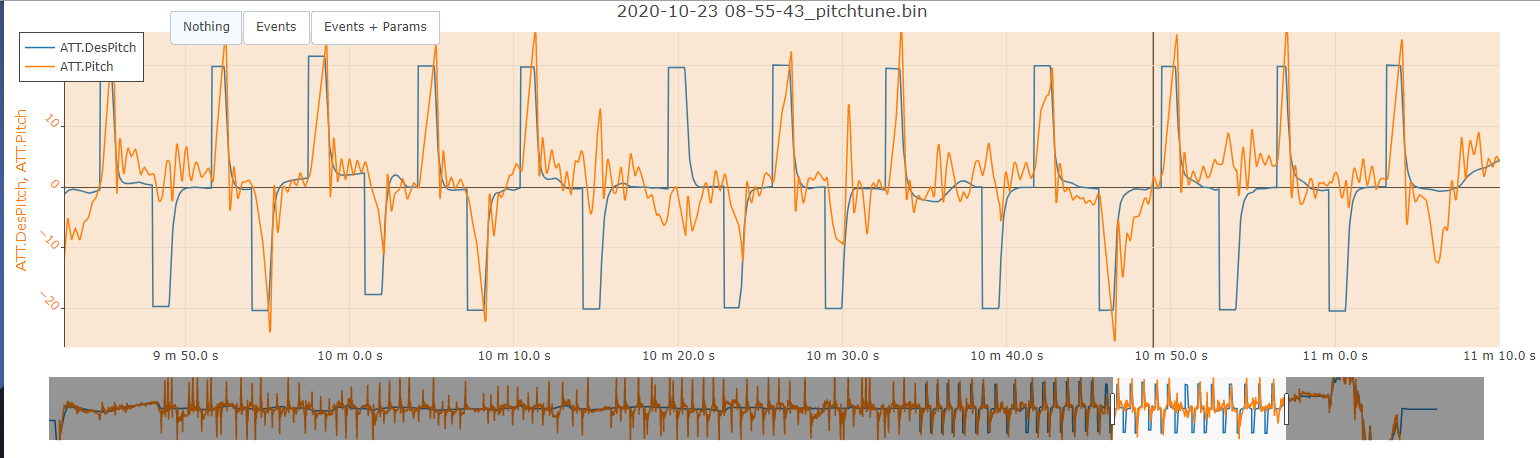
Maybe warnings in the wiki are warranted? so manual tune Pitch I guess
I also found that the wiki does not warn that the loose loiter in QAUTOTUNE only is there for roll and pitch
@iampete SO there was a warning in the wiki…kinda buried though…I have made it stand out in several places (PR3098)…so today I hand tuned pitch as best I could…with PID values and the angle P…its still not very good…stable,but on the verge of wiggling in both P and D…ANGLE_P does not seem to have a big effect…decided to keep it at default of 4.5…there seems to be a big lag from stick demanded pitch angle to angle achieved…do I need to mess with Q_A_RAT_PIT_FF? seems that it might need to be increased from default of 0.2 to something higher…
I think we need a tuning guide for tailsitters…