Since params from my last log:
——————
1) Firstly I changed this parameters:
ATC_ACCEL_P_MAX, 50000→30000
ATC_ACCEL_R_MAX, 50000→30000
ATC_ANG_PIT_P, 5→3.5
ATC_ANG_RLL_P, 5→3.5
ATC_ANG_YAW_P, 4→3
INS_HNTCH_FREQ, 124→62
INS_HNTCH_BW, 62→31
——————
2) Then I made test Flight with
ATC_RAT_RLL_P: 0.132298
ATC_RAT_RLL_I: 0.132298
ATC_RAT_RLL_D: 0.0046
ATC_RAT_PIT_P: 0.132298
ATC_RAT_PIT_I: 0.132298
ATC_RAT_PIT_D: 0.0046
Log: 2022-07-12 10-56-20.bin - Google Drive
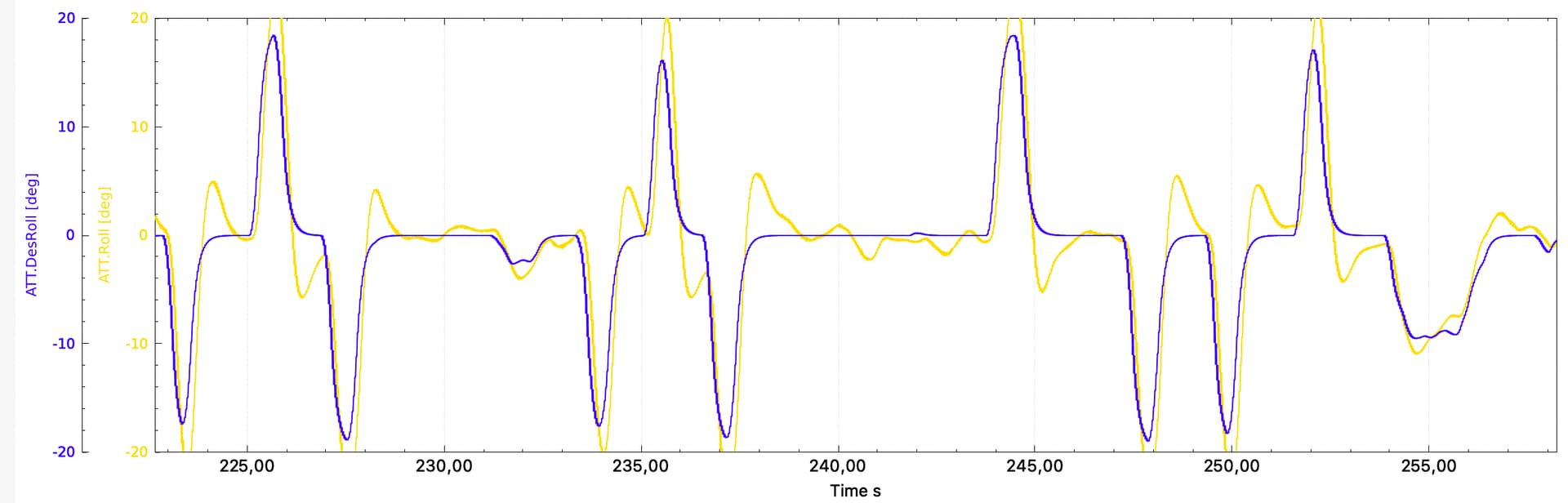
I saw overshot 5 deg (25%) when drone made Roll from -20 deg to 0 deg:
——————
3) Then I made tune Flight with
ATC_RAT_RLL_I: 0.132298
ATC_RAT_RLL_D: 0.0046
ATC_RAT_PIT_I: 0.132298
ATC_RAT_PIT_D: 0.0046
Log: 2022-07-12 11-11-28.bin - Google Drive
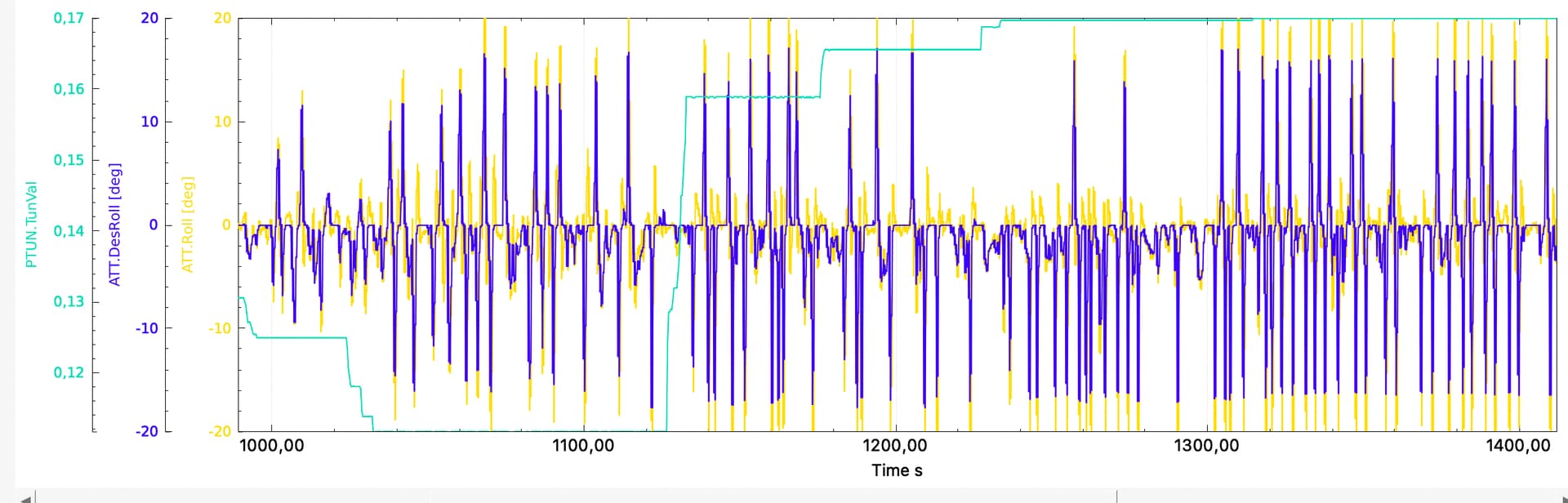
In-Flight Tuning with Rate Roll/Pitch kP 0.11→0.159→0.165→0.17
kP 0.11 overshot 7 deg (35%) when drone made Roll from -20 deg to 0 deg
kP 0.159 overshot 3.5 deg (17.5%) when drone made Roll from -20 deg to 0 deg
kP 0.165 overshot 3.5 deg (17.5%) when drone made Roll from -20 deg to 0 deg
kP 0.17 overshot 3.5 deg (17.5%) when drone made Roll from -20 deg to 0 deg
——————
4) Then I made tune Flight with
ATC_RAT_RLL_I: 0.132298
ATC_RAT_RLL_D: 0.0046
ATC_RAT_PIT_I: 0.132298
ATC_RAT_PIT_D: 0.0046
Log: 2022-07-12 11-50-30.bin - Google Drive
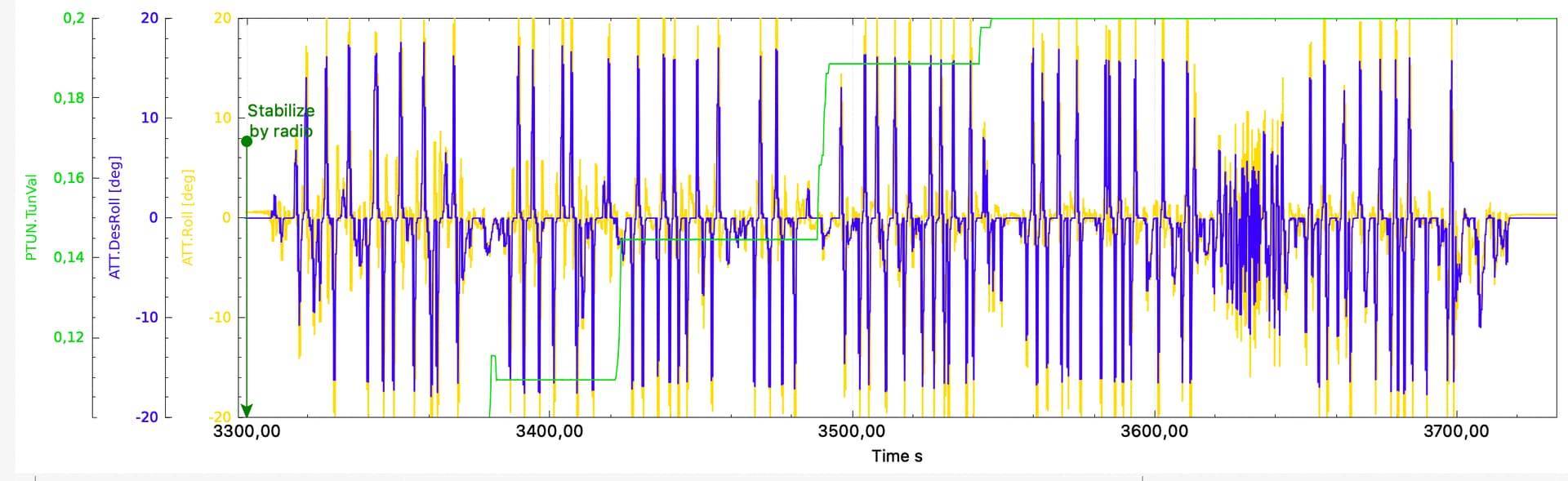
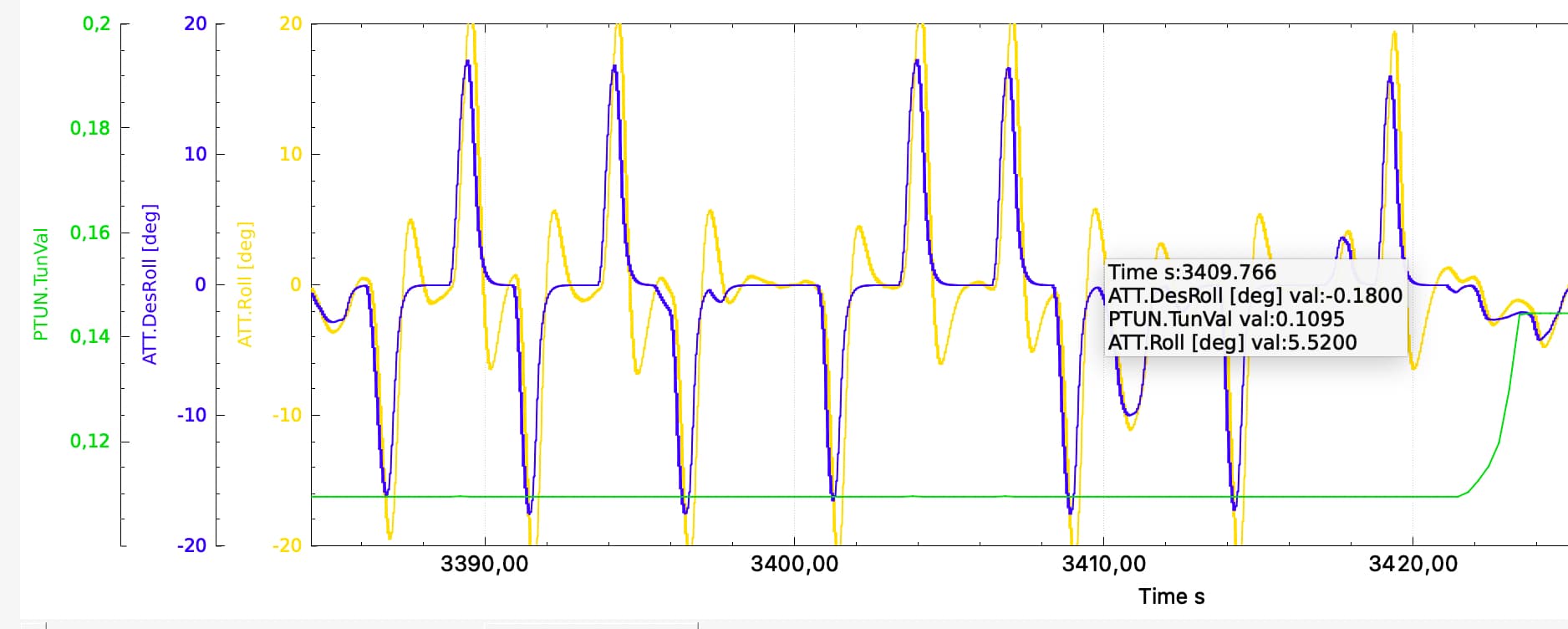
In-Flight Tuning with Rate Roll/Pitch kP 0.1→0.11→0.145→0.189→0.2
kP 0.1 overshot >6 deg (>30%) when drone made Roll from -20 deg to 0 deg
kP 0.11 overshot 5.5 deg (27.5%) when drone made Roll from -20 deg to 0 deg
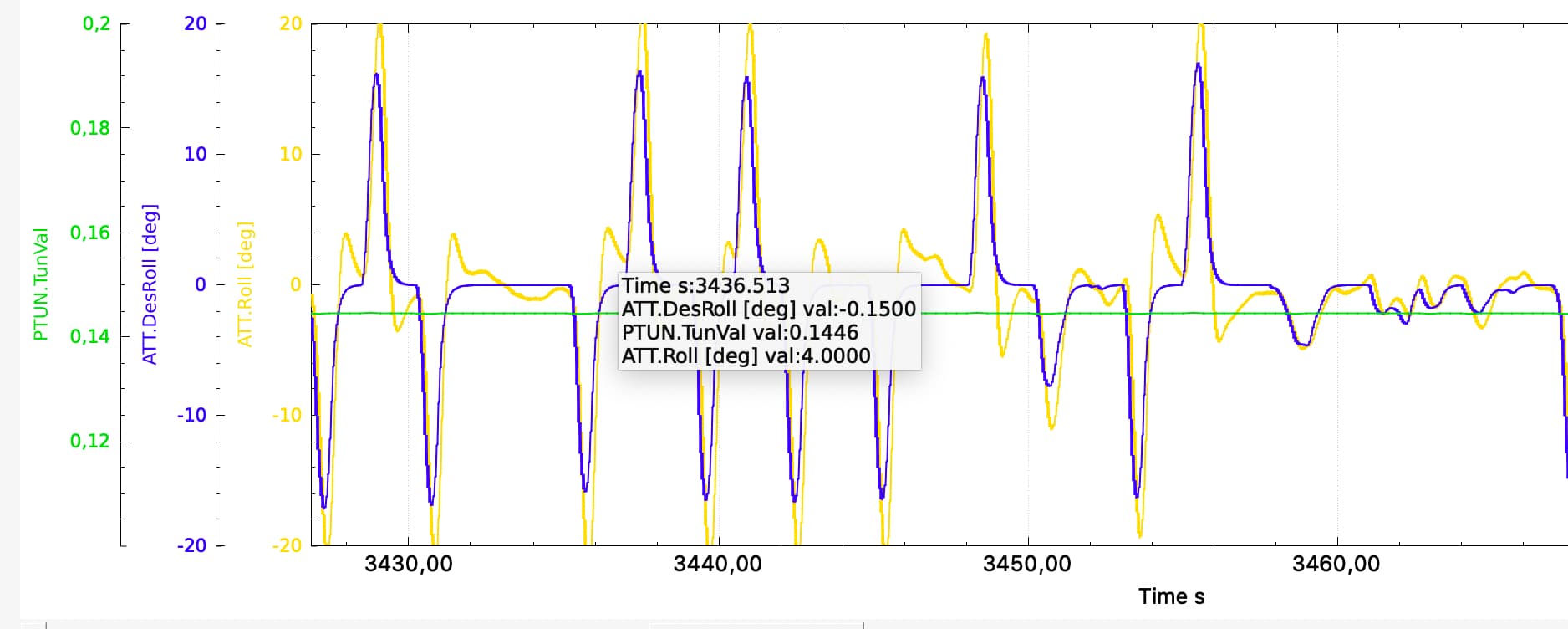
kP 0.145 overshot 4 deg (20%) when drone made Roll from -20 deg to 0 deg
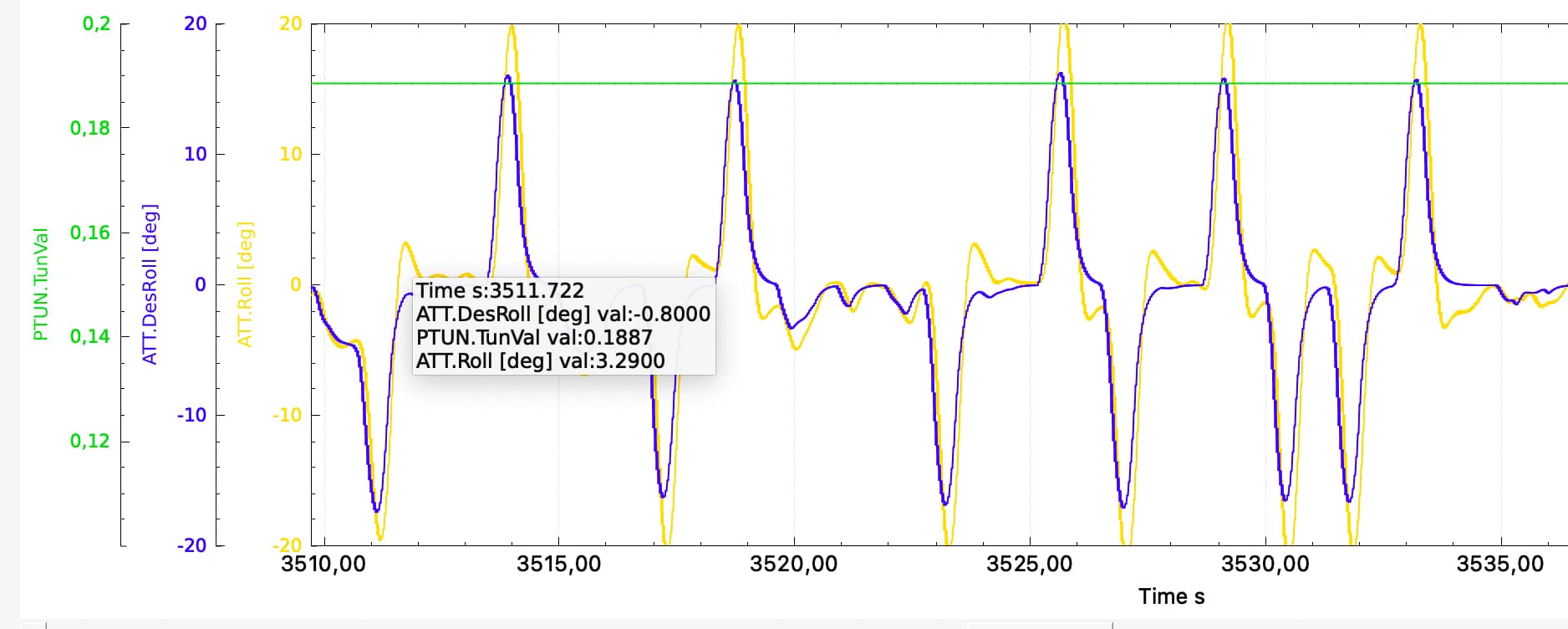
kP 0.189 overshot 3.29 deg (16.45%) when drone made Roll from -20 deg to 0 deg
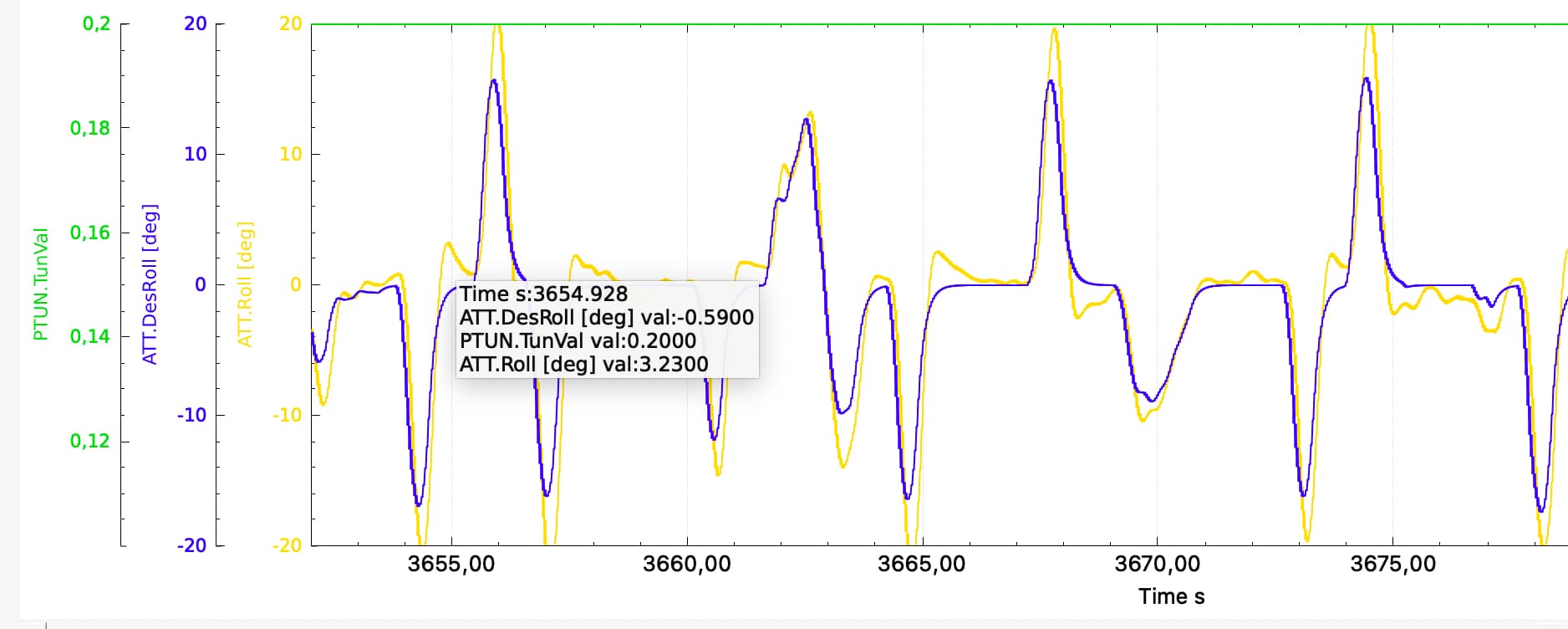
kP 0.2 overshot 3.23 deg (16.15%) when drone made Roll from -20 deg to 0 deg
——————
5) Then I made tune Flight with
ATC_RAT_RLL_I: 0.132298
ATC_RAT_RLL_D: 0.0046
ATC_RAT_PIT_I: 0.132298
ATC_RAT_PIT_D: 0.0046
Log: 2022-07-12 12-09-14.bin - Google Drive
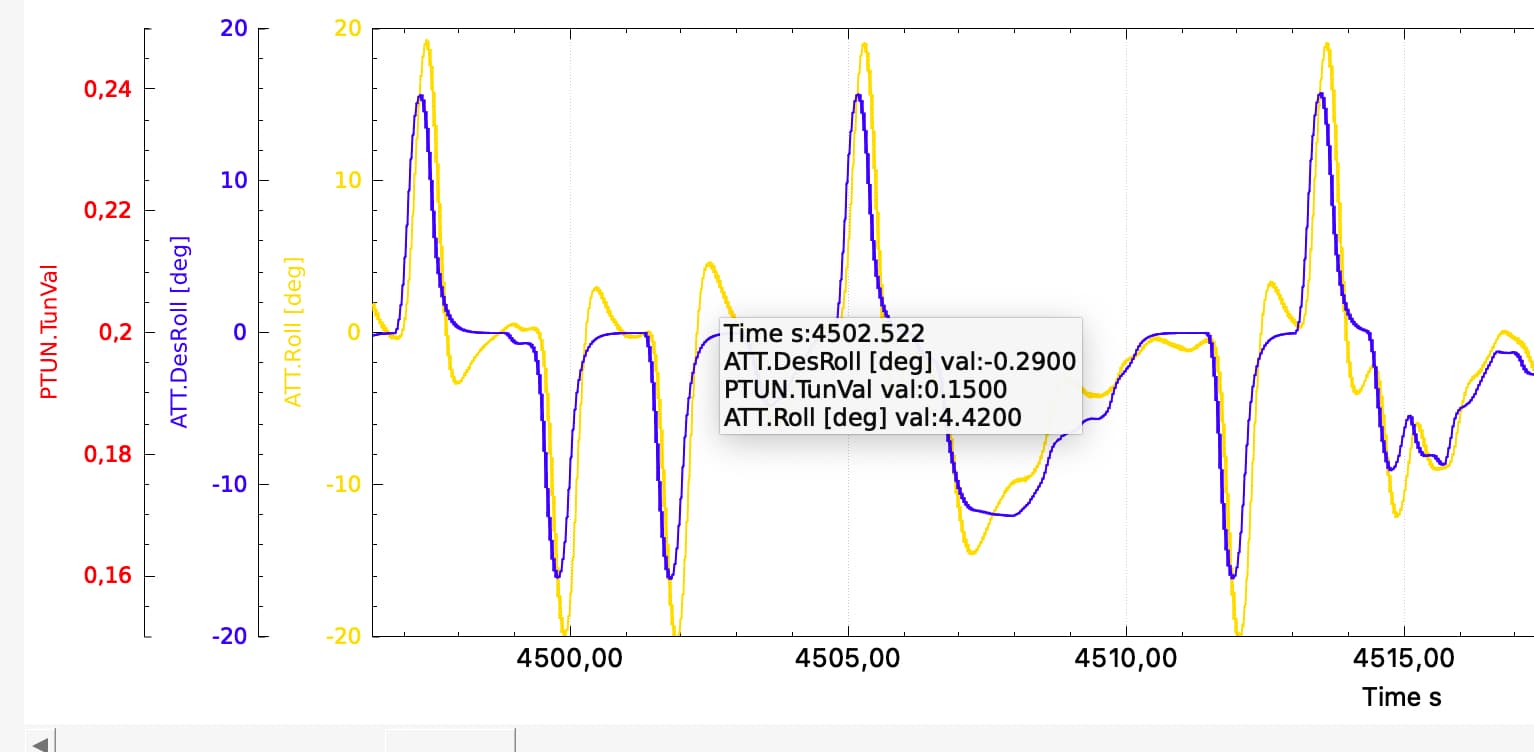
In-Flight Tuning with Rate Roll/Pitch kP 0.15→0.2→0.25
kP 0.15 overshot 4.42 deg (22.1%) when drone made Roll from -20 deg to 0 deg
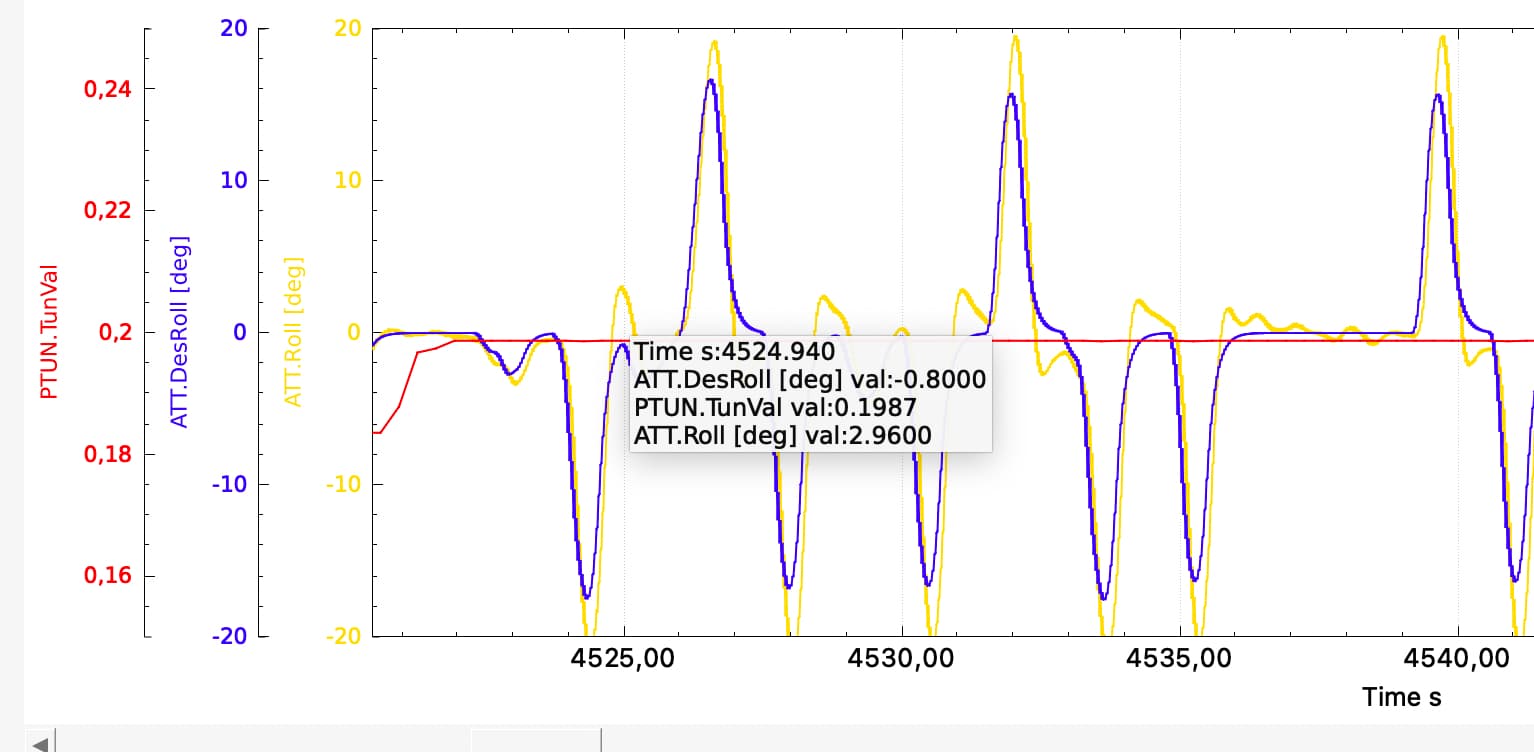
kP 0.2 overshot 2.96 deg (14.8%) when drone made Roll from -20 deg to 0 deg
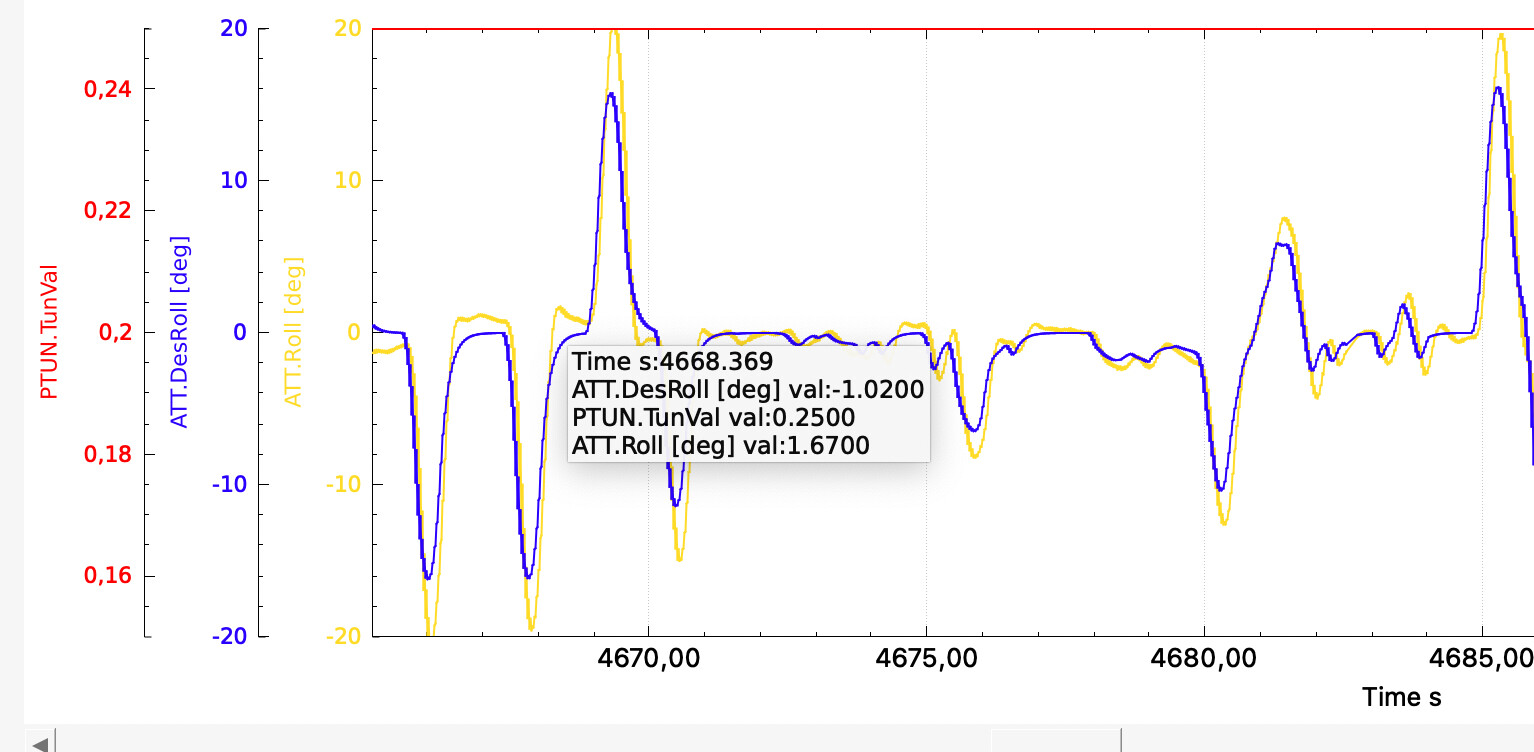
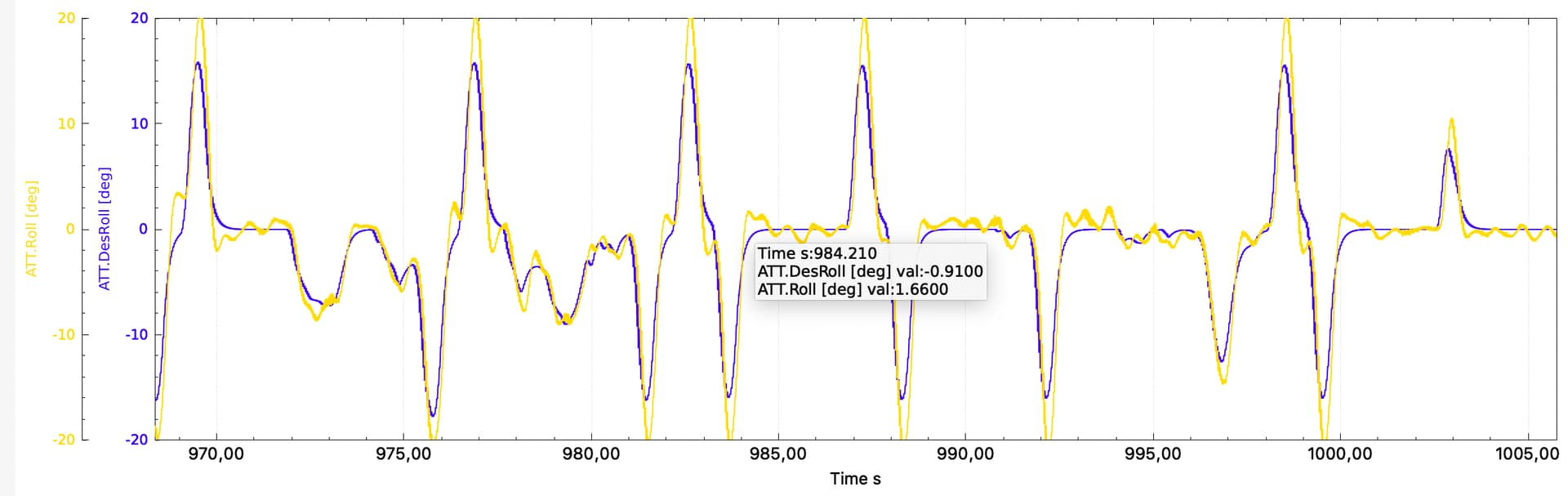
kP 0.25 overshot 1.67 deg (8.35%) when drone made Roll from -20 deg to 0 deg
——————
6) Then I made tune Flight with
ATC_RAT_RLL_P: 0.25
ATC_RAT_RLL_I: 0.25
ATC_RAT_RLL_P: 0.25
ATC_RAT_PIT_I: 0.25
Log: 2022-07-12 12-36-46.bin - Google Drive
In-Flight Tuning with Rate Roll/Pitch kD 0.004→0.005→0.003
kD 0.05 overshot -1.35 deg (6.75%) when drone made Roll from 20 deg to 0 deg
kD 0.03 overshot -2.27 deg (11.35%) when drone made Roll from 20 deg to 0 deg
——————
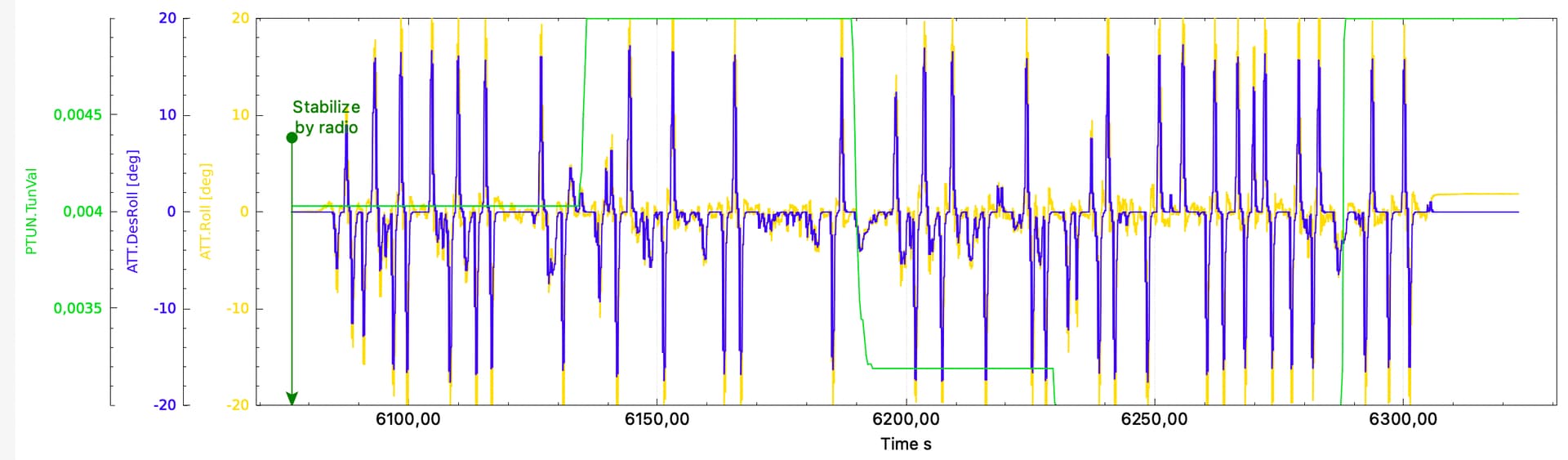
7) Lastly:
ATC_RATE_P_MAX,0→100
ATC_RATE_R_MAX,0→100
ATC_RATE_Y_MAX,0→90
Log: 2022-07-12 13-20-46.bin - Google Drive
average overshot 2 deg (10%) when drone made Roll from 20 deg to 0 deg
——————
My issues:
-
I have overshots when drone make Roll or Pitch from 0 to 20 deg (always). I think it is because of center of mass, which is below the propeller group. If I can reduce these overshots, how?
-
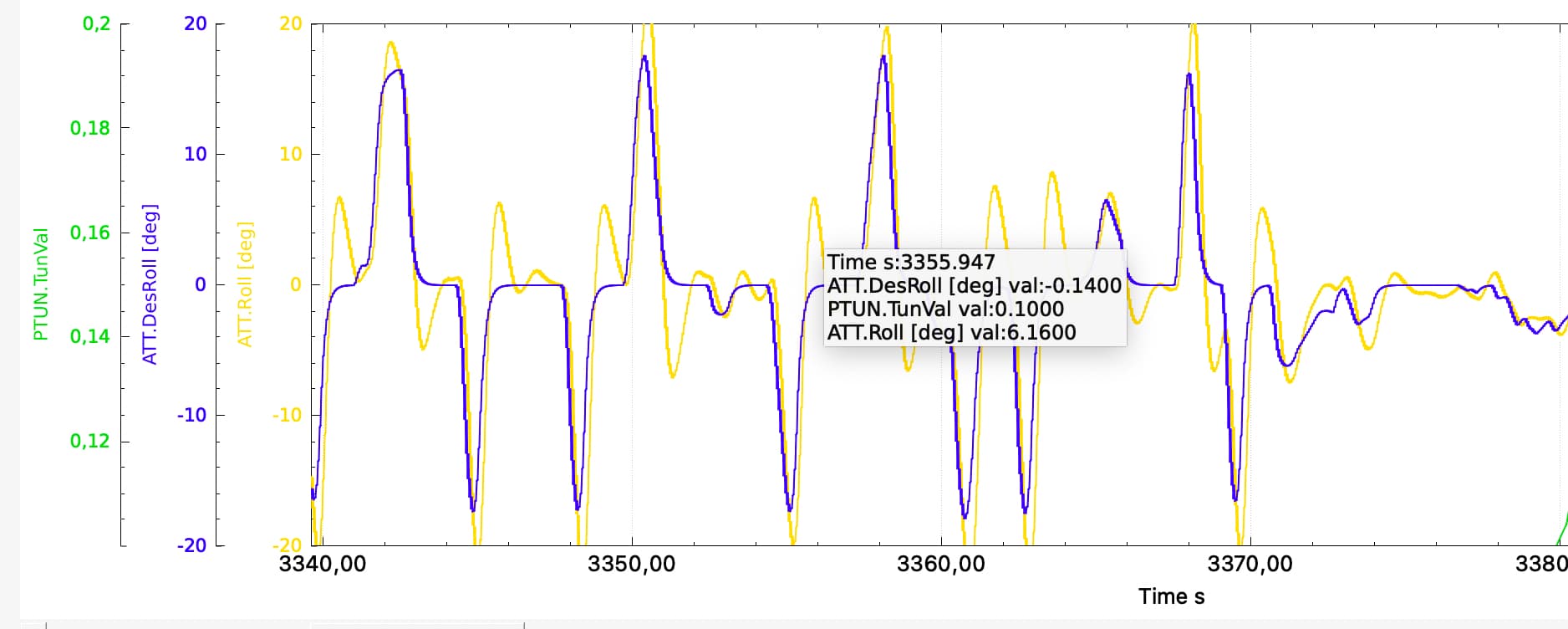
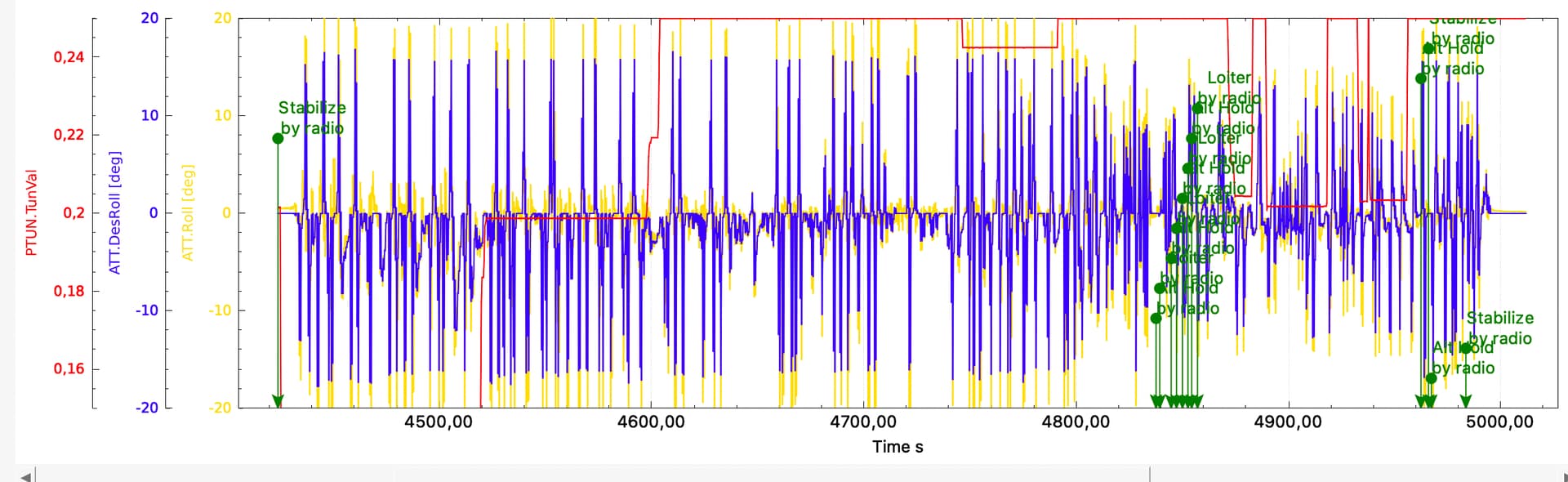
Why my desRoll about 15 deg? Why it isn’t 20 deg. My ANGLE_MAX is 2000.
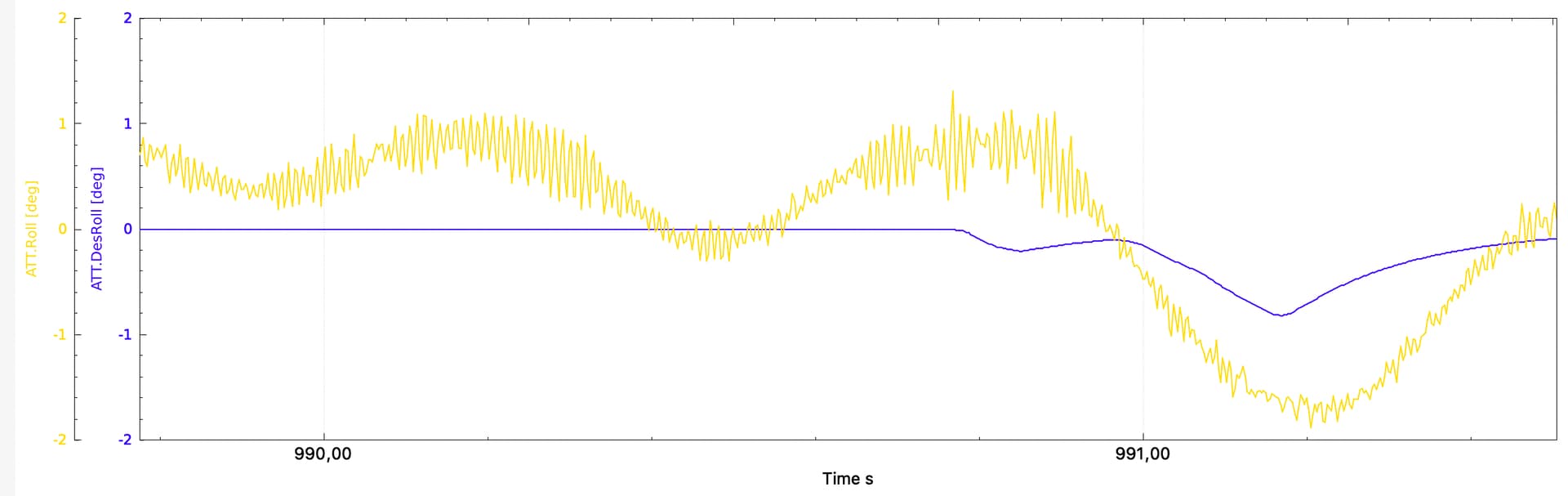
-
I always have oscillations when I scale Roll graph:
@dkemxr @Harald, I would be very grateful if you could help)