after my last post regarding the Battery Failsafe RTL issue I had several successful test flights. But today I had a major crash which damaged my whole work and even my motivation to carry on with copter flying . In about 50m and Pos. Hold. the copter began to spin, looked like one arm of the Quad hanging down, and crashed without having the chance to do anything. I do not know what really happened, maybe a motor fail? Main parts of frame, the GPS, landing gear, canopy is just scrap… I would like to know what happened and what I did wrong, so maybe you could help regarding my investigations?
Here you’ll find the .bin file of the crash flight.
Just for clarification to make log analysis easier: when you say “one arm hanging down,” did you mean that it looked like the arm had physically broken and was dangling, or just that the copter was leaning towards that arm?
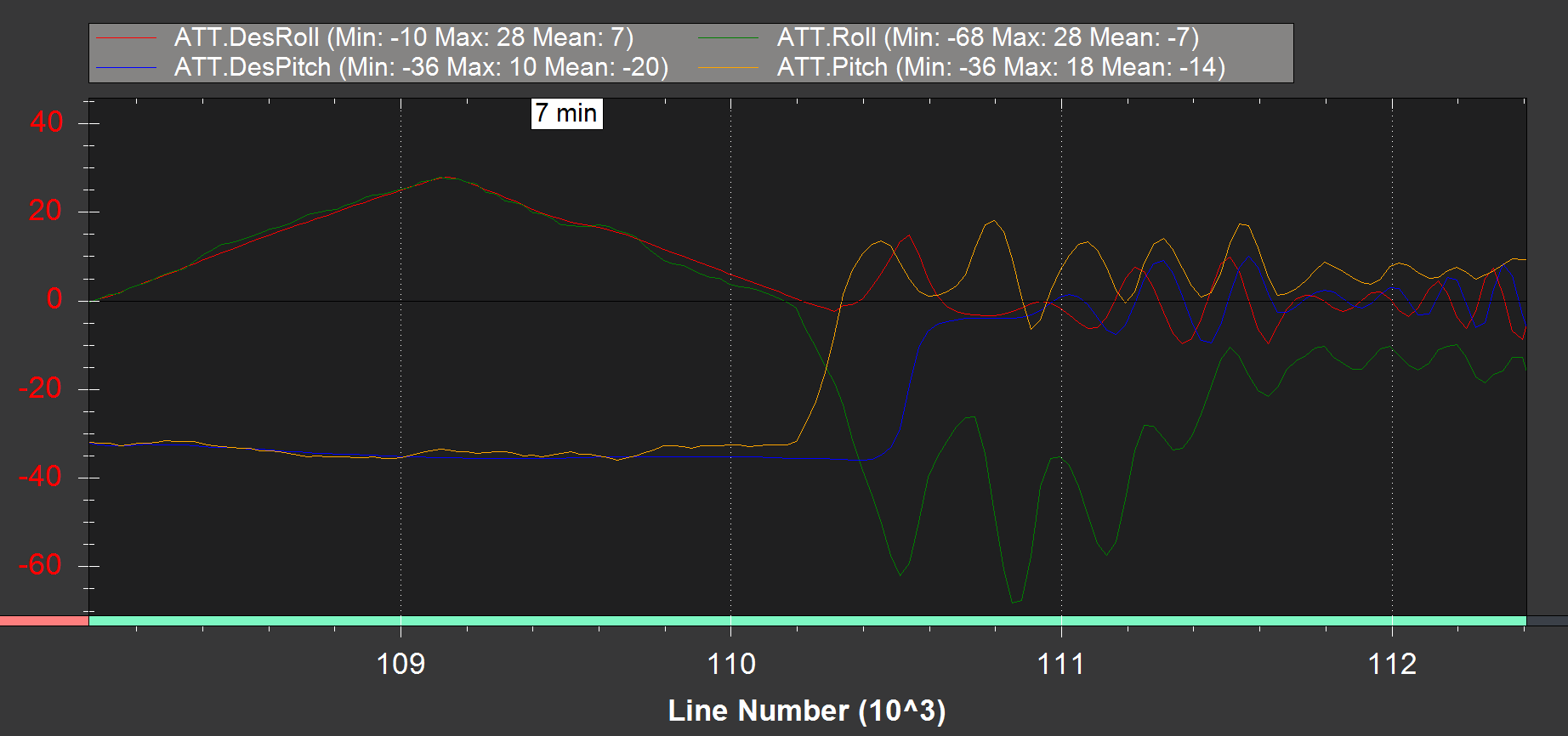
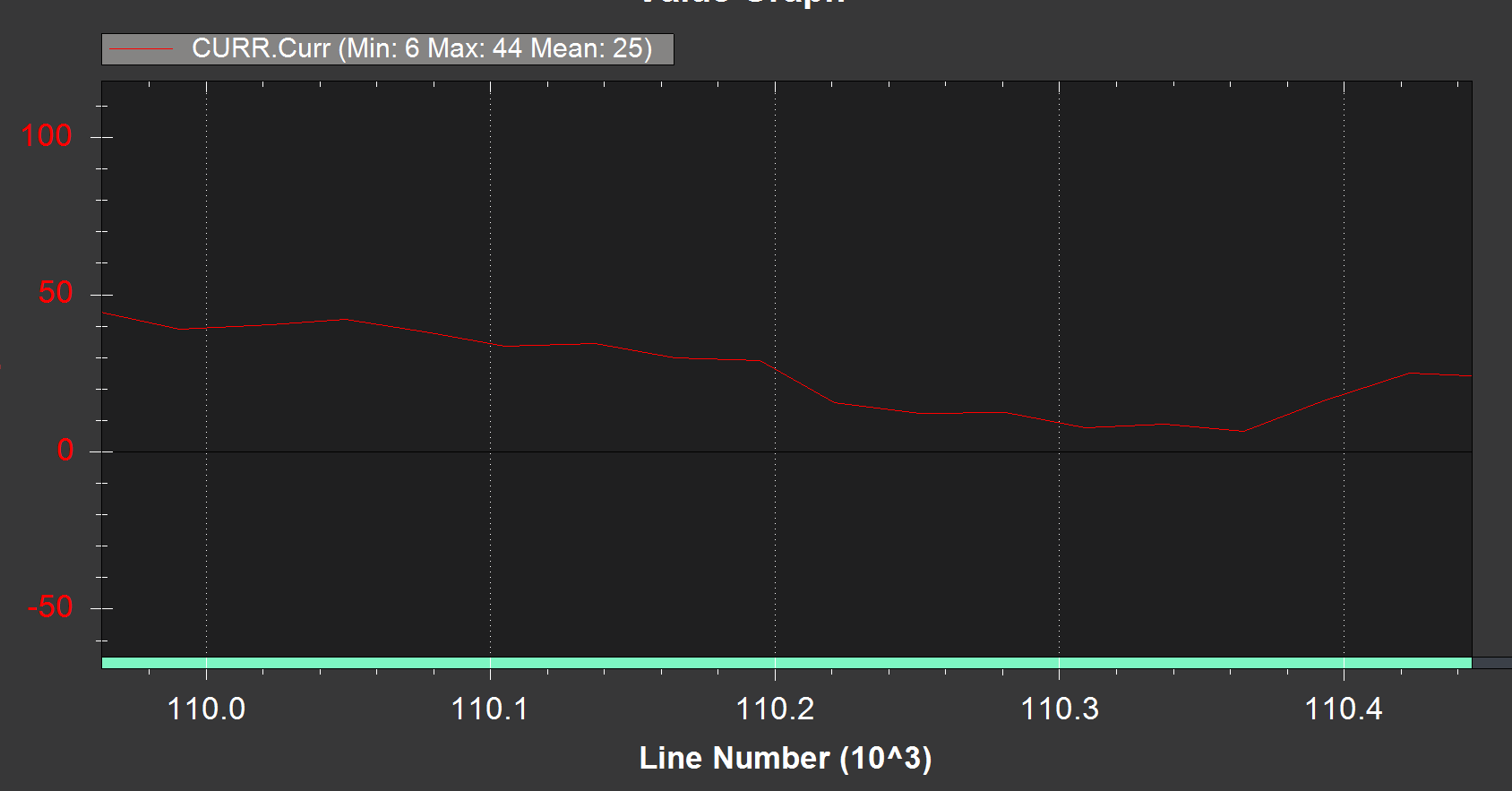
OK, I looked at your log. I think your left, rear motor or esc failed. Yhe easiest way to confirm a motor failure is to look at the rc outputs. Unfortunately your rc ins and outs were not logged. You can also look at the actual vs desired attitude. It looks like every thing was fine then at line 110199 it pitched up, rolled left, and started spinning to the left. This is consistent with lose of the # 2 motor. There is also a drop in current at the same point in time that is above the noise level. Below are screen shots of when the failure happened.
Your job now is to figure out why that motor failed and what can be done better on the next build. Don’t give up, get better!
Chris.These things happen.I’ve built ten copters up to 960mm and they all fly beautifully.My last build however flipped every time I tried to launch it.I still haven’t sorted out what is causing it.Even those of us who are experienced have disasters.It’s what we do.
So this looks like a mechanical failure which is another thing I’m used to.They happen.Bad solder,bad motor winding,factory fault in an ESC,lightning strike,frame failure,wire failure,they are familiar to us all. Just learn what you can and take that into your next project or the rebuild.Always walk away when frustration bites.
Eventually this may be fun and you will have learnt something.Keep on keeping on.
Thanks to all of you for your fast help and the kind words. As from tomorrow morning on I will try to find out about the exact failure regarding the loose of motor 2 (ESC, Wiring, Motor itself).
Due to your encouragements a new frame is already ordered and I will do an improved rebuilt with the lessons learned.
Thanks,
Chris
Hi guys,
I just checked the copter: mechanically it’s crap, but everything works regarding the electronics. All motors working fine, ESCs working and they seem to be synchronized, too… ???
What to do next? Rebuild with same motors and ESCs? That would cause me a bad feeling. Regarding the logs I lost motor 2 in flight, but now the motor seems to be in good condition…
Maybe you experienced guys can give me some advise?
Regards,
Chris
PS: ESCs (Afro 30A with SimonK) are mounted under the canopy, so no cooling from rotors. But I checked that several times, they do not get really warm let alone hot.
I just decided to change all 4 motors as the 4 ESCs to be safe… I went to T-Motor for the parts, Ecalc shows more power with 4 minutes more flight time. Lets see
I had a rogue motor on a hexa build leading to a couple of flips on take off.On the bench it performed perfectly every single time but when that extra bit of oomph was applied on take off the one motor just cut out.Turned out in the end,after several hours of detection,to be a bullet connector having dirt in the spinner section (cheap sprung bullets).It wasn;t an isolated incident on that copter.Three motors played up all told and caused me some frustration chasing the fault.I soldered them solid after that and it it now a reliable copter.And I solder all my connections solid now.
Hi together,
I checked all solderings as the even all connectors, gave vibrations and mechanical force to the powertrain but could not find the real issue. The ESCs (Afro) and Motors (Multistar) are Chinese products (as most of all the stuff) and I am not able to do any tests with load (current) wihout investing another “couple” of hours. I’ll trust to the experience and the data Greg_Fletcher provided and do a new build with T-Motor ESCs and Motors. A kind of frustrating, but as an electronics engineer I know about the frustration of sporadic failures
Multistar are generally good motors not so different from T-Motors as quality .
Afro Esc are, I guess, previous generation mosfet esc , so they get more hot than last generation Esc that generally use BlHeli.
I suggest to use BlHeli Esc like these https://hobbyking.com/it_it/turnigy-multistar-32bit-51a-race-spec-esc-2-6s-opto.html , incredible efficiency.
Keep your Multistar motors .
Change your bitmask for dataflash logs to record RC_In and RC_Out , it will be possible to understand exactly what happens.
You made the right choice Christian, you would never be able to trust it with out knowing the exact cause of the failure. Loose fitting bullet connectors have been known to get loose from vibration. I have been using them because I need to the way my copter is put together. The motor wires are inside the tubes and I use Hobbywing esc’s that use bullet connectors. I check them for a tight fit often. I am putting new T-motors on my 650 copter. The connector on the motors are much better quality than on my first motors from 3 years ago. Same MN-3508 motors, but 380 kv from 580 kv.
The reason I am changing motors is because I almost lost my machine. Each wire on a 12 pole motor splits into 2 wires at the connection to the coil wires. Due to metal fatigue one of wires separated at the connection. Luckily for me the motor still ran on 2/3 of the poles. I flew it like this several times, not knowing there was a problem. The copter was tipping left and forward on take off and it just didn’t sound quite right I could hear a high pitched winning sound. The last flight was a really long one over a river with a huge battery. While carrying it back to the house I could smell the burning motor and it was HOT! The motors on this copter only get slightly warm normally.
The moral of the story is… Use silicone sealant around were the lead wires go through the base of the motor so that there can be no movement.
 . In about 50m and Pos. Hold. the copter began to spin, looked like one arm of the Quad hanging down, and crashed without having the chance to do anything. I do not know what really happened, maybe a motor fail? Main parts of frame, the GPS, landing gear, canopy is just scrap… I would like to know what happened and what I did wrong, so maybe you could help regarding my investigations?
. In about 50m and Pos. Hold. the copter began to spin, looked like one arm of the Quad hanging down, and crashed without having the chance to do anything. I do not know what really happened, maybe a motor fail? Main parts of frame, the GPS, landing gear, canopy is just scrap… I would like to know what happened and what I did wrong, so maybe you could help regarding my investigations?