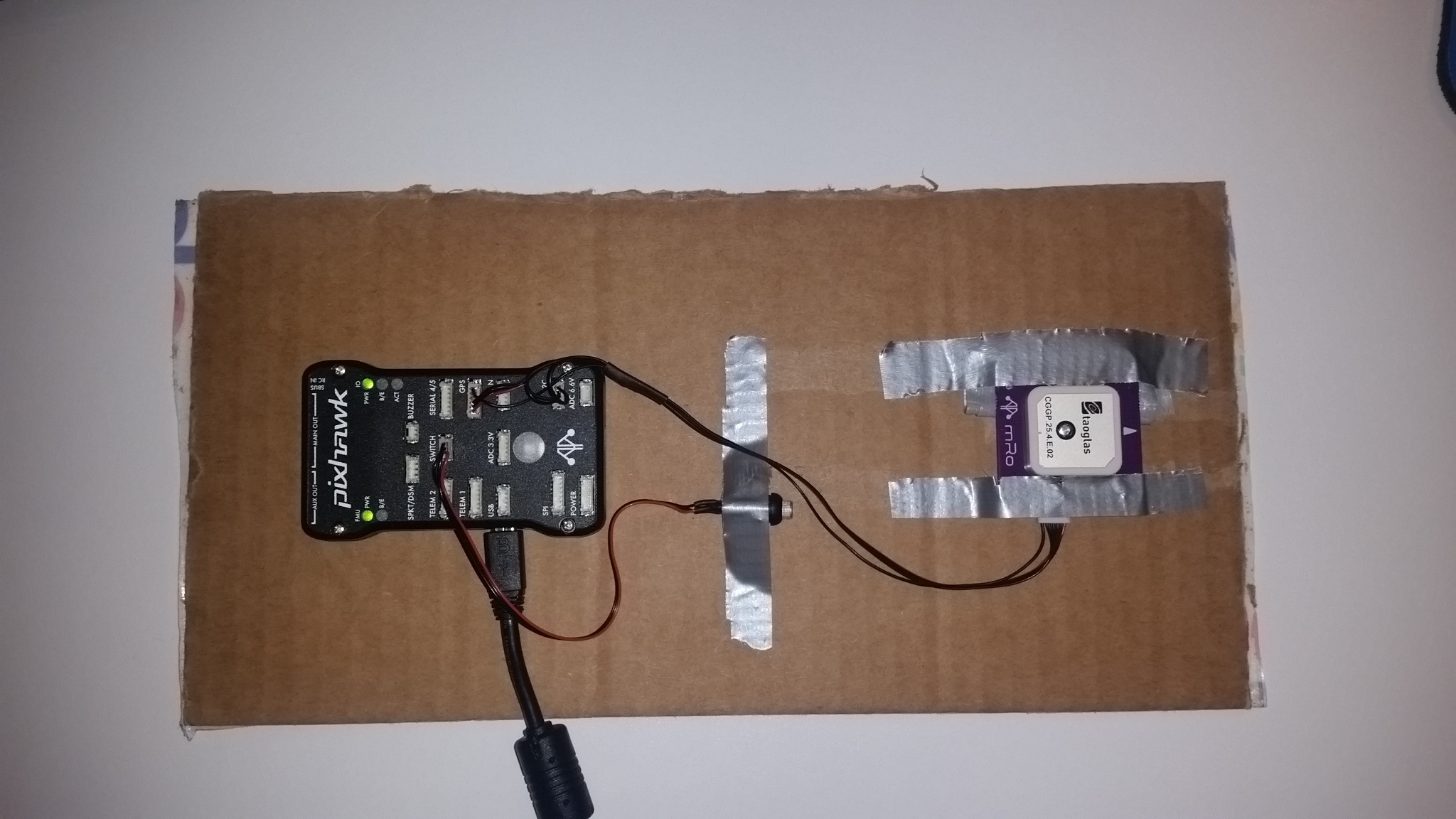
I just bought a Pixhawk kit from mRobotics, my 2nd one from them. It comes with their Ublox GPS/compass unit as well. I have the Pixhawk and GPS/compass unit taped to a piece of cardboard to maintain their orientations for bench testing.
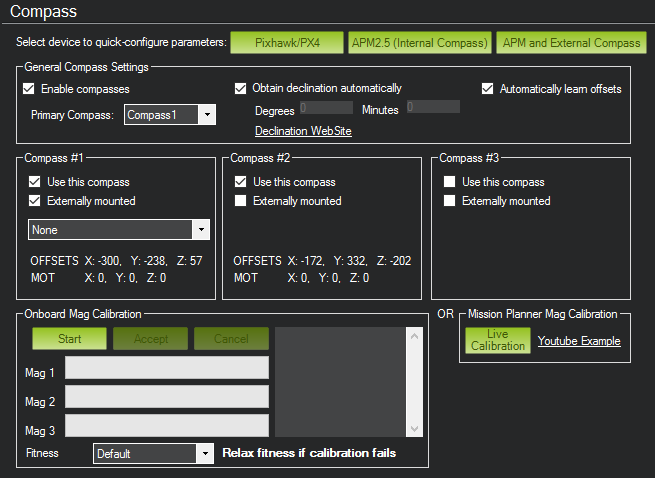
The compass calibration seems to go okay, although the numbers seem high. I tried both the onboard and live calibrations with similar results.
After the calibration, I’m still getting a lot of “Inconsistent Compasses” and “Compass Variance” errors.
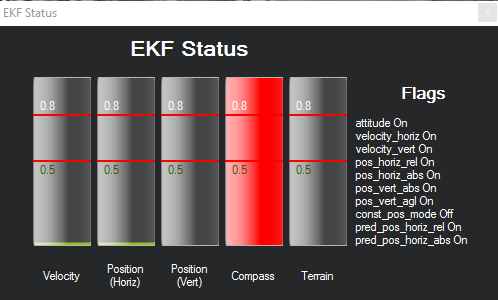
I can load the EKF status window and slowly yaw the system and watch the compass EKF go off the chart relatively quickly.
Not really , since internal compass is widely unreliable it often gives readings that are contradictories compared to the one of the external compass .
The point is that if the difference between the two compasses becomes too big , then, EKF do not know which compass is right and so it display an error