2017-06-03 17-59-00.bin (2.0 MB)
hello, in calm day copter fly ok. But in wind it rises up or falls down.

here log from calm day

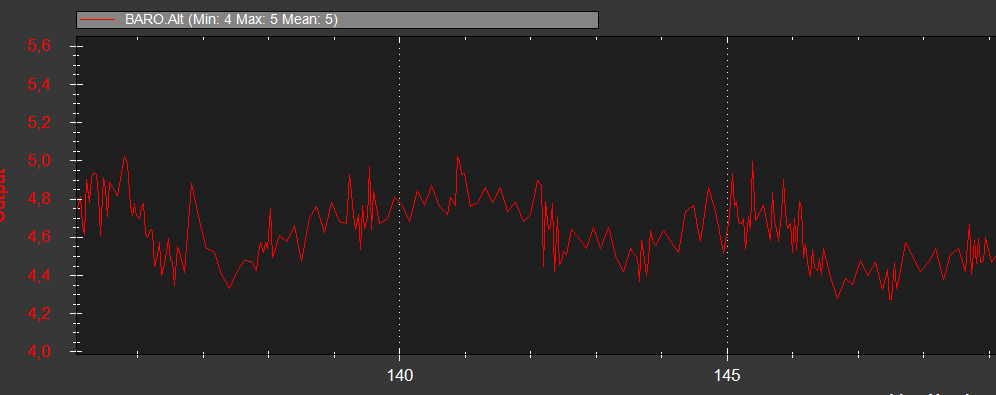
Barometer is not sufficiently covered?
980kv motor, 3s, 9x45prop, pixracer 3.4.6 fw.
2017-06-03 17-59-00.bin (2.0 MB)
hello, in calm day copter fly ok. But in wind it rises up or falls down.
Yes, clearly your baro isn’t very stable with the wind. Try to cover it better.
I hard mounted my pixracer on a 250 and no enought space for dampening so I disable the 2nd imu and fly nice.
thanks Cala! Try disable it. Order this dampers
may be helped.
About the parameter “INS_ACC_BODYFIX” you do not know anything?
Did not change it?
Looks nice,
I use this in bigger cuads https://hobbyking.com/en_us/apm-flight-controller-damping-platform.html work nice too.
If you can solve vibrations mechanically, looks better choice than try to resolve changing params
i have this dampers 
The don’t fit in my copter
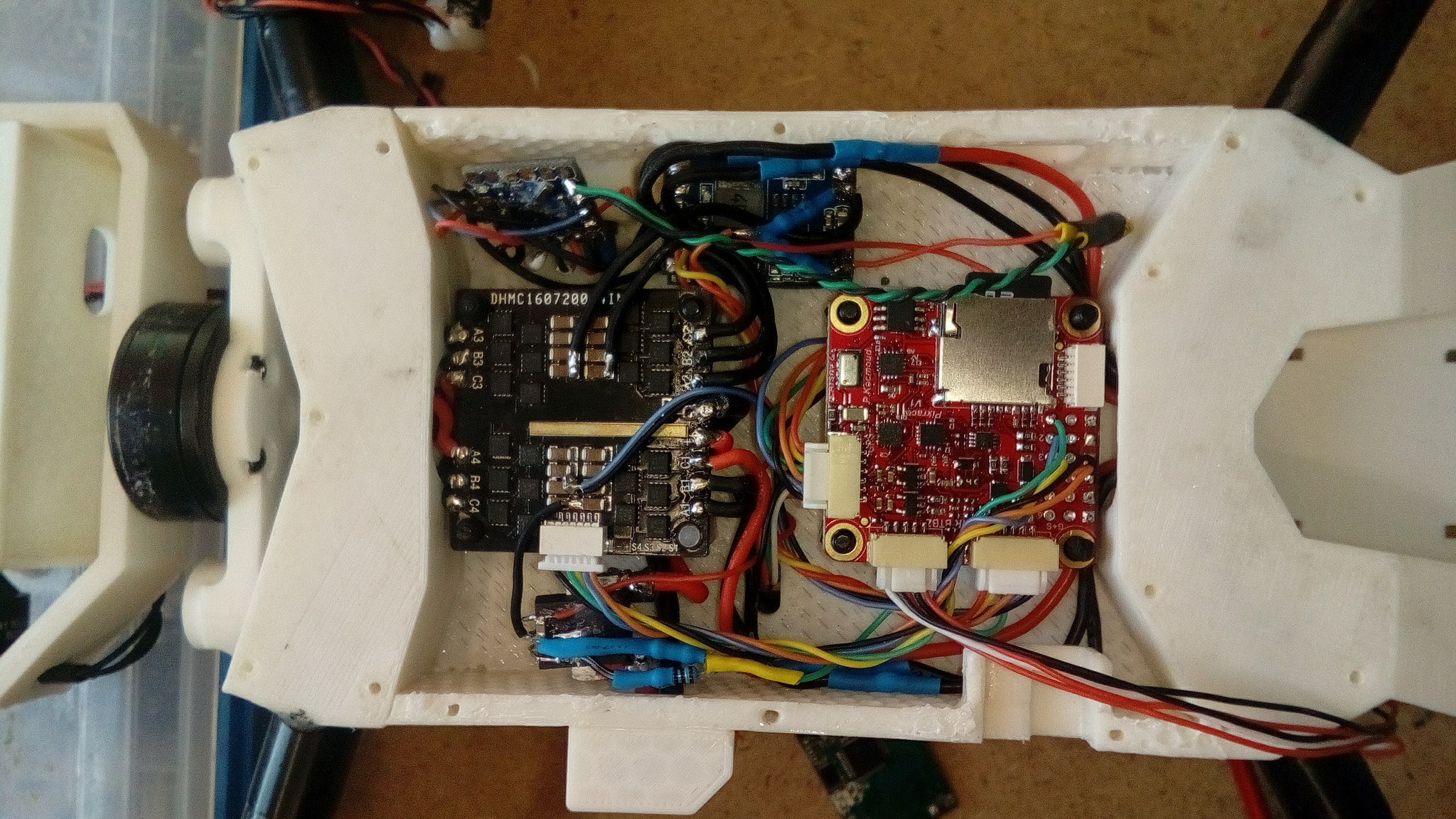 IMG_20170219_092408 by Alexey Degterev, on Flickr
IMG_20170219_092408 by Alexey Degterev, on Flickr
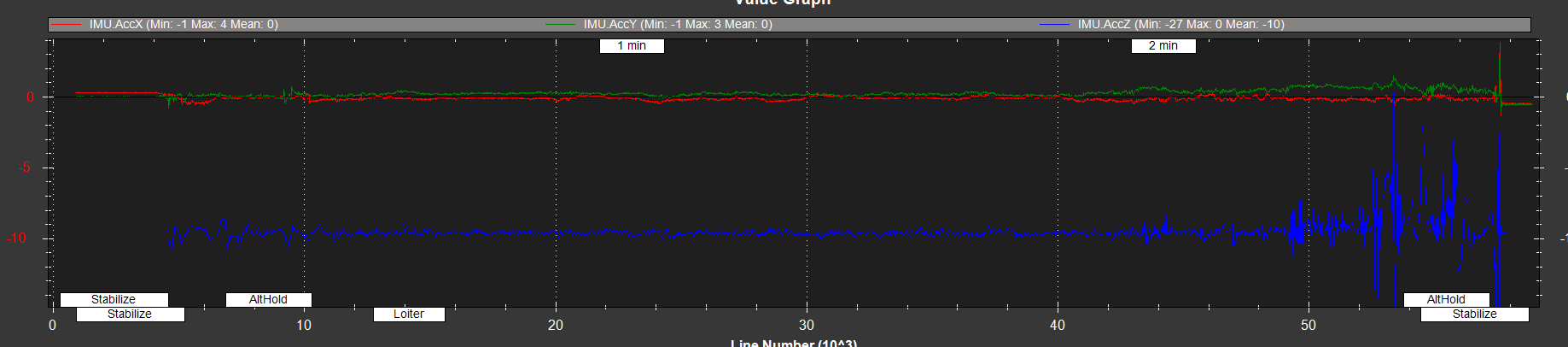
disable second accelerometer


don’t help
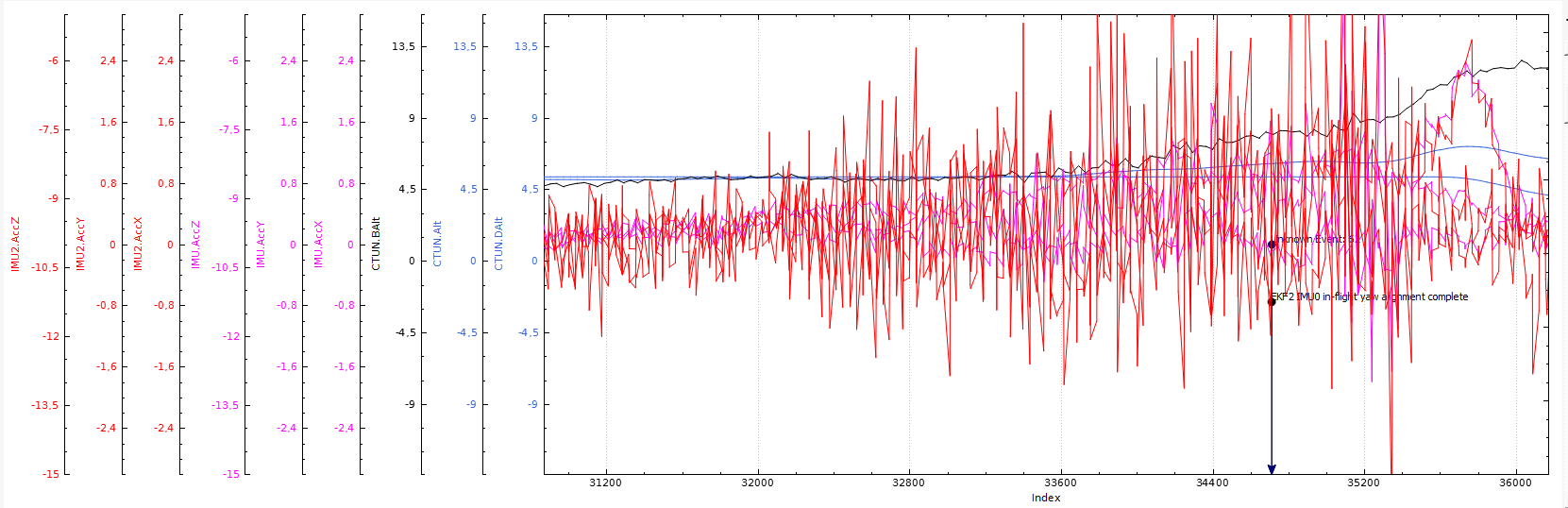
compare baro with GPS data (have drotek XL M8N gps-glonass)
Found how disable second accelerometer in EKF2… Try again
Can you share your latest log?
Are you have genuine pixracer?
I’m confused by the saw on the barometer graph.
Thakns!
Yes. Genuine from AUAV,
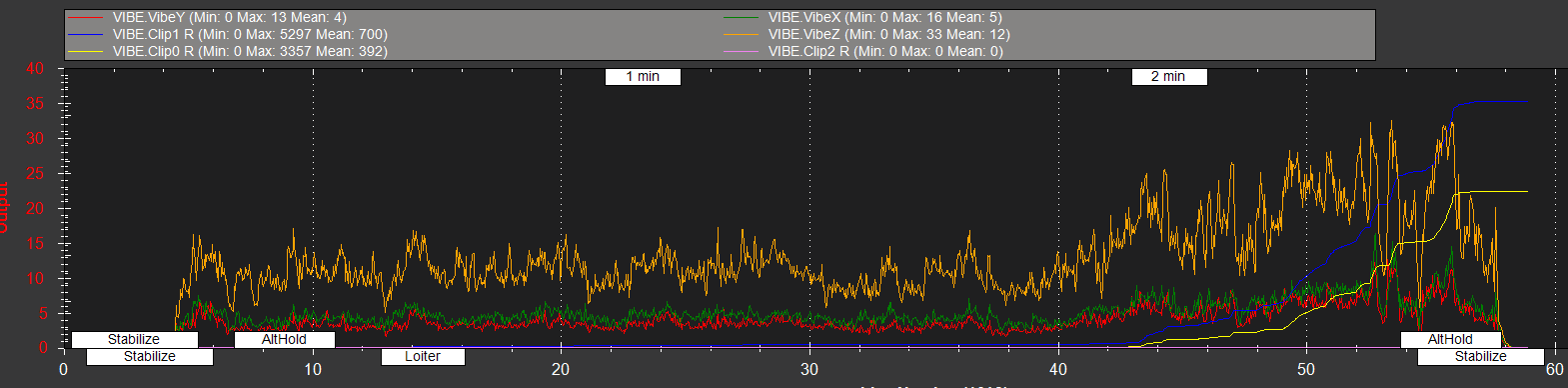
Its typical that you can fly in calm days but not in windy ones when you have vibration issues, I had that problem from many time at the beguining with my first quad, baro doesnt like vibrations, doesnt like light and no like turbulence arround.
baro covered e.t.c.
This graph is confusing me.
As soon as I can I share my baro graph