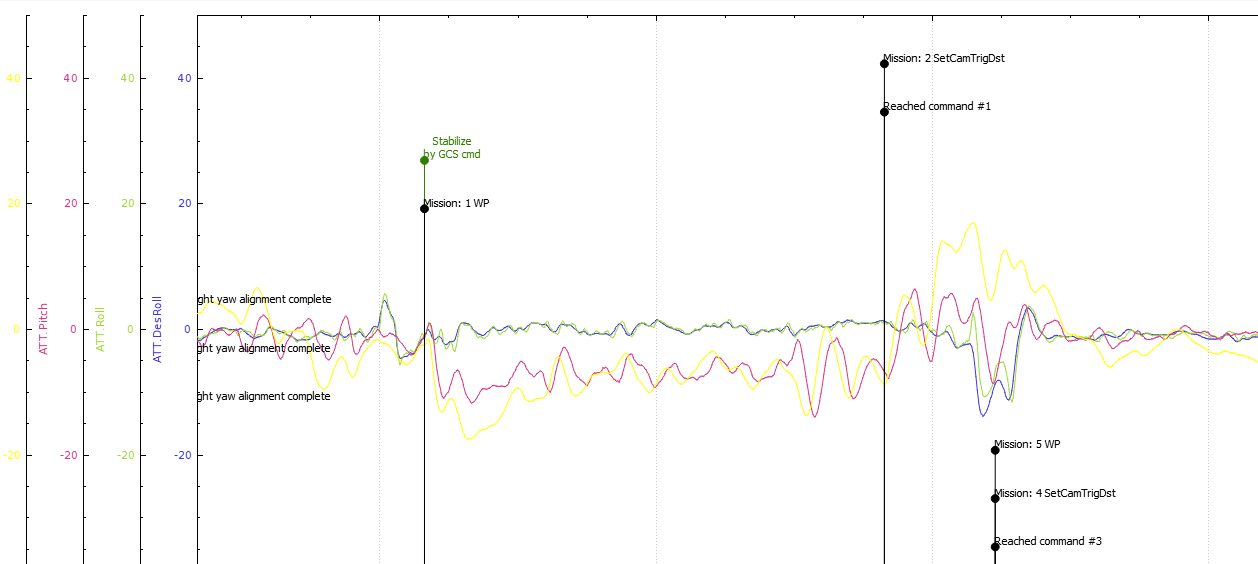
Most of the time Roll and DesiredRoll are close, but Pitch is always struggling
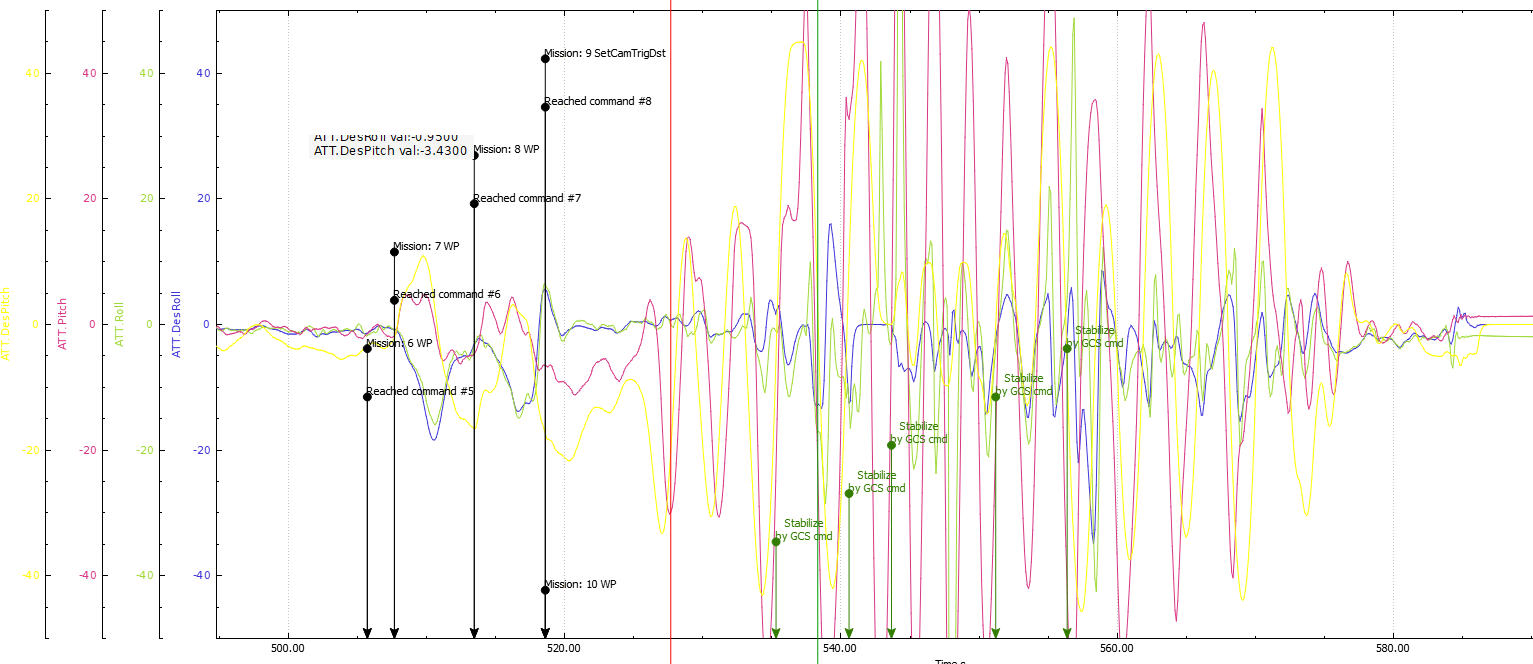
Eventually the oscillations are getting out of control:
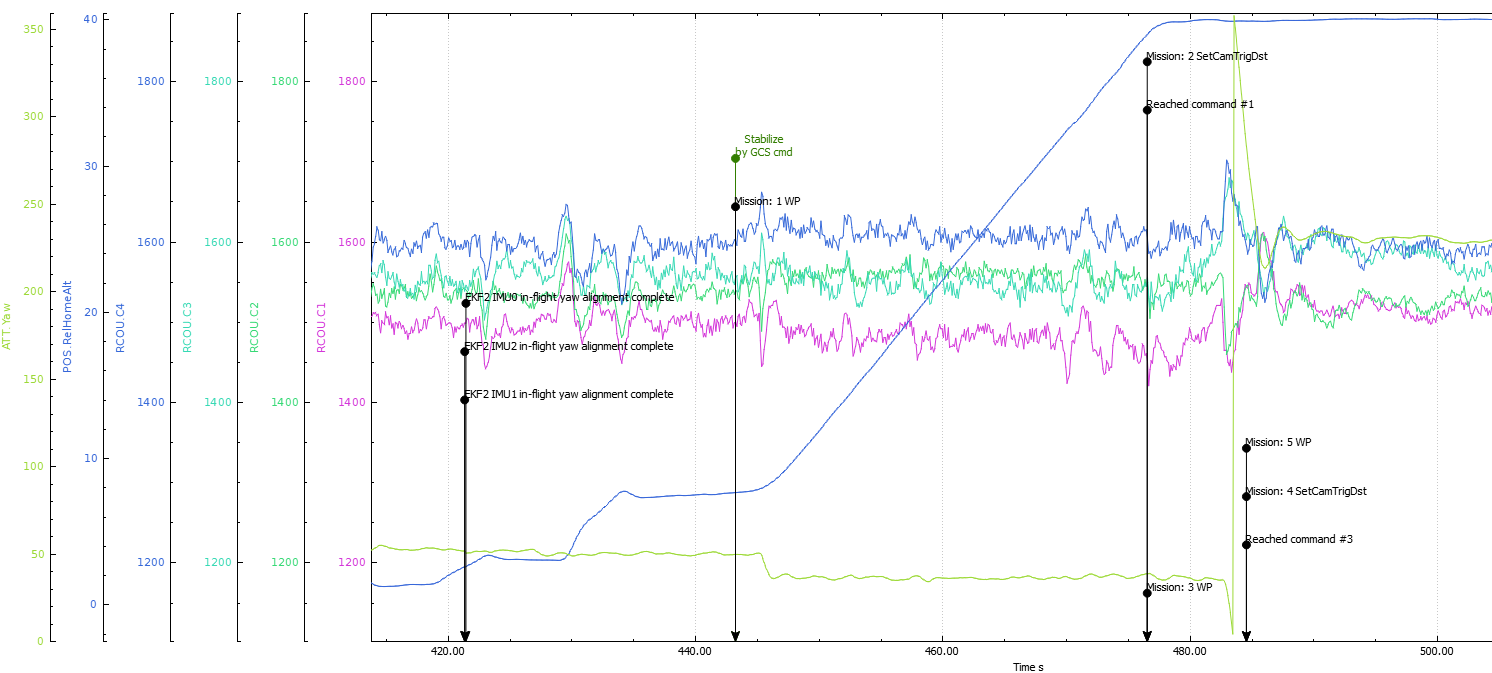
Your motor outputs are not equal
It’s like you’ve got a weight/COG imbalance but also a bit of motor mount twist causing a physical yaw bias. This is not drastic nor the sole cause of the instability, but it’s definitely something to be fixed because it reduces the amount of control available for stability and desired movements.
You can even see in this graph where there’s a yaw change and continued motion, how the motor outputs change to match, but I think they should still be closer together.
Set all these first, then we’ll get into some other details:
ATC_RAT_PIT_FLTD,10
ATC_RAT_PIT_FLTT,10
ATC_RAT_RLL_FLTD,10
ATC_RAT_RLL_FLTT,10
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,10
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
MOT_BAT_VOLT_MAX,25.2
MOT_BAT_VOLT_MIN,19.8
Tuning
The ATC_ANG P values are wrong for some unknown reason, and are a big cause of the oscillations. They get that far different usually by a mistake on the keyboard or mouse, or a serious weight imbalance during Autotune. Set them to be the same for now:
ATC_ANG_RLL_P,7.63688
ATC_ANG_PIT_P,0.813512
Something like this for a start:
ATC_ANG_RLL_P,7.0
ATC_ANG_PIT_P,7.0
For your size props, you’d normally use
MOT_THST_EXPO,0.71
but with the T-Motor Flame ESCs the consensus is to use these, they are essential really:
MOT_THST_EXPO,0.2
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
And for smoother RC input try:
ATC_INPUT_TC,0.2
or as high as 0.3
Perform all the changes above then do another test flight around in ALTHOLD with gentle stick inputs. Dont try missions and guided mode or anything fancy yet. Let’s see the .bin log file from that…
If everything seems fixed you could do another Autotune too.
These are a bit suspicious to me, but leave them as-is for now and we’ll see the what the next .bin log file is like.
ATC_RAT_RLL_P,0.0901221
ATC_RAT_RLL_I,0.0901221
ATC_RAT_RLL_D,0.0038464
ATC_RAT_PIT_P,0.709674
ATC_RAT_PIT_I,0.709674
ATC_RAT_PIT_D,0.00475686