Hi all,
I’m using the Cube orange mounted to the hexsoon 650 with DSHOT BLHeli32ESC’s (with tear drop booms) so motor mounting is fixed and the motors cannot be rotated.
The UAV flies really well with pitch & roll, it climbs out and descends really well. I have attempted to autoune the yaw but it doesnt really make any difference. Left yaw is better that right, when moving forward flight and trying to turn left yaw input has very little effect right is slightly better, but it feels like there is no yaw authority at all when moving into forward flight, it generally feels disconnected with massive delays between inputs from the radio and response from the uav. When doing fast climbouts and fast descents, the UAV holds its heading and doesn’t rotate at all.
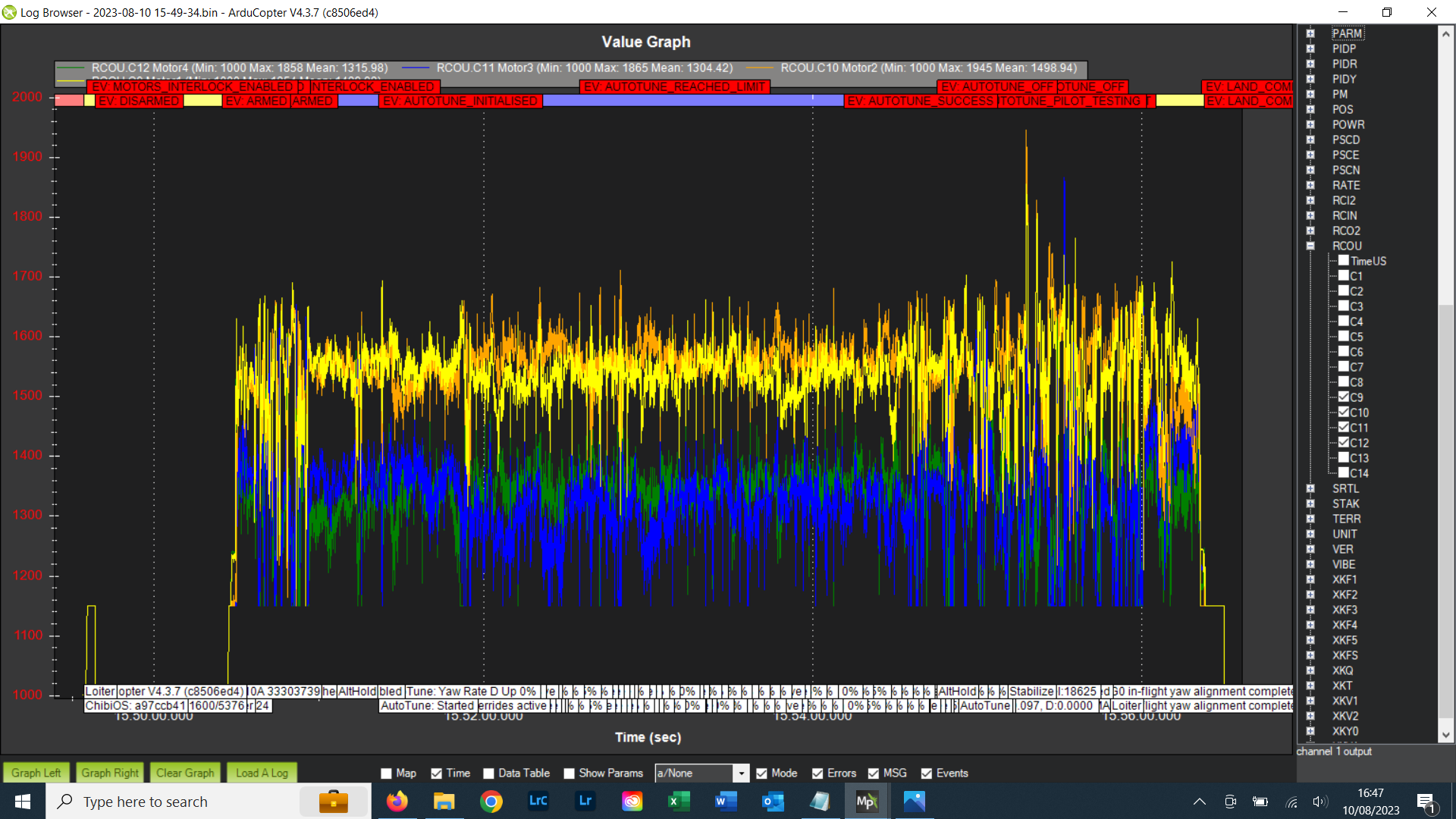
Can anyone comment on this? I’m new to arducopter and not sure. I have attached a log file and screen grab for the motors. This log captured the yaw auto tuning and then some circuits afterwards.
I was under the impression the motor outputs should be tracking along the same line or very close? the graph shows the motors are out, and in pairs, they look like they are seperated by CC and CCW motors
Any inuput would be great?
Matt.2023-08-10 16-44-03.bin (799.2 KB)