Hi, i have a question - about new I2C driven TFMini Plus sensors.
Is there any way to setup multiple sensors of this type on the same I2C bus or do they all have the same address?
Hello,
I did not had a chance to test it yet, but according to the specs, you can permanently save the I2C address on the TFMINI making it possible to use multiple devices on the same bus.
In fact my question was serious So no benefits aparat from “fun”? (like accuracy or frequeny)
BTW maybe a setup like 360 (2D) + some TFminis at an angle to catch 3D?
Reading the Blog you can see that the POC was initially designed for the VL53L0X.
Unfortunately the lack of range made the thing a little bit marginal for avoidance.
This is why I experimented with the TFMINI for the extended range up to 6 Meter.
Being a Work In Progress, it would be now the time to update the project with the VL53L1X, making it a 7 vectors Lidar Indoor Sensor with a range of 4 Meter and a price tag under 80$ … Not bad for a Solid State , lightweight sensor that is fully integrated with the existing avoidance library.
sir @ppoirier
I am working on collision avoidance system i am able to get distance and orientation from tf-mini lidar sensor, and following above i push this in vehicle.message_factory.distance_sensor_encode()
without propeller i want to test is it working correctly or not, It doesn’t seems it working correctly
i am new to this field.
i want to know what exactly “vehicle.message_factory.distance_sensor_encode” its doing with distance and orientation.
i am able to setup raspberry pi its communicating with pixhawk

 So no benefits aparat from “fun”? (like accuracy or frequeny)
So no benefits aparat from “fun”? (like accuracy or frequeny)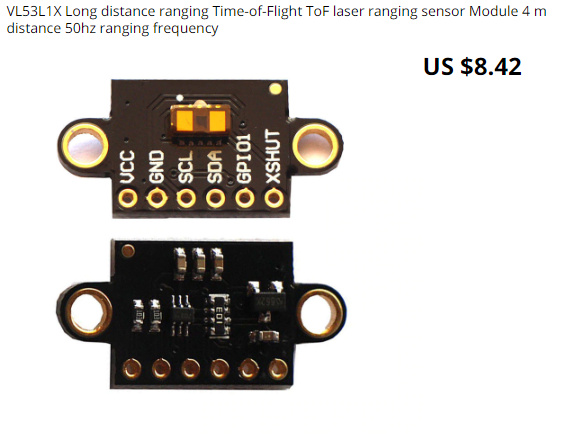
 cid:_Foxmail.1@cc8138b8-aece-5e9a-d046-a50b78dfcd28
cid:_Foxmail.1@cc8138b8-aece-5e9a-d046-a50b78dfcd28