I am Mo from Bluebird Mountain. We are a small startup based in Hamburg, Germany. Currently we are building a personal avalanche safety drone. “Avalanche safety drone?” I hear you ask. Well, the below video sums it up pretty well.
Alright, so that’s what we are doing. But since I’m sure you are wondering, let me fill you in on some of the details, what is going on under the hood.
For our PowderBee prototype we are using Ardupilot (of course) on a Pixracer, in combination with an onboard companion computer (RasPi Zero currently). The software is all open source and available in my github repo. https://github.com/moobsen
To locate a buried person, we are relying on an active beacon, a so called avalanche beacon (“LVS” or “Lawinenverschüttetensuchgerät” in German. Yeah, I know, the language can be crazy ) If you are into skiing or snowboarding, you might be familiar with these devices. These devices work, but are not trivial to operate. And in case of an avalanche, a human error can result in death. That’s why we are building the drone.
We have build a custom antenna system, which can receive the avalanche beacon’s signal. It works, but it is not perfect just yet. In fact, if you are into electronics and drone, and based in Hamburg… we should talk. We are currently looking for someone on a co-founder basis, to take over the electronics department.
In any case I want to thank everyone active here for the great work. Without Ardupilot it would be way harder, if not impossible, to build such a drone.
A really interesting project! A downward facing lidar or sonar would be good to deal with the slope - you’ve probably already thought of this. Sending the LVS data to the ground station in real-time would be really good as well.
Yes, I forgot to mention that, we are currently using the TFmini as a downward facing distance sensor. Our tests have shown it works quite well above snow (there is a thread on this forum somewhere regarding this )
Currently we are improving the reception distance of the antenna module, that’s the area where we only progress slowly. Specifically it would be developing a better digital filter (or improving the one we already have implemented on a PSoC)
In our company we also had to do terrain following on slopes (up to 40°) with a quad, without terrain data, so we set the altitude command to 5m above terrain and relied on a rangefinder. We found out that a P altitude controller was not sufficient for what we wanted to do. The vehicle follows the slope at the wrong altitude: lower than command when climbing and bigger than command when descending. Actually, the error in altitude grows with the horizontal speed of the vehicle.
Our analysis : the fact that the vertical velocity command is proportional to the error in altitude implies that having a non-zero steady-state vertical velocity command (necessary in slopes) is not compatible with meeting the altitude target (error is zero). Transient altitude over- or undershoots resulting from slope changes are never compensated for.
To solve this problem, we implemented a PI altitude controller. The I term adds the vertical velocity command needed in steady-state and the target altitude is reached while following the slope. To avoid large altitude overshoots when the drone stops at a waypoint we decrease the I term when reaching waypoints. We tested this in a 3D environment (Gazebo) and on the terrain and it seemed to work quite well, although we still have a little work to do to reduce over-/undershoots. An other limitation is that we should adapt the desired horizontal speed to the maximum allowed vertical speeds and terrain slope.
Maybe this can help (although it might not be the perfect solution and we tested it on just a few flights)
That’s a neat project. With the limited range of avalanche beacons, I can see this being a challenge.
How do you define the search pattern? What about trees? The debris can be quite sizable.
I’ve talked similar idea with some of my SAR friends, but that was mostly for recovery. (Much larger drone, so deployment time would be 1 hour+)
Yes, in the case of avalanches you really only have minutes, that’s why the drone needs to be light and small, so that one can always have it available in the backpack.
Currently there is no obstacle avoidance, so trees are a problem. For future versions this might be implemented, but the initial use case is for areas without trees.
Regarding the search pattern, there already exist recommendations on how the pattern should be for manual search and our pattern is based on this. It’s a meander pattern, where the distance between each curve is a function of the reception range of the antenna and the speed of flight.
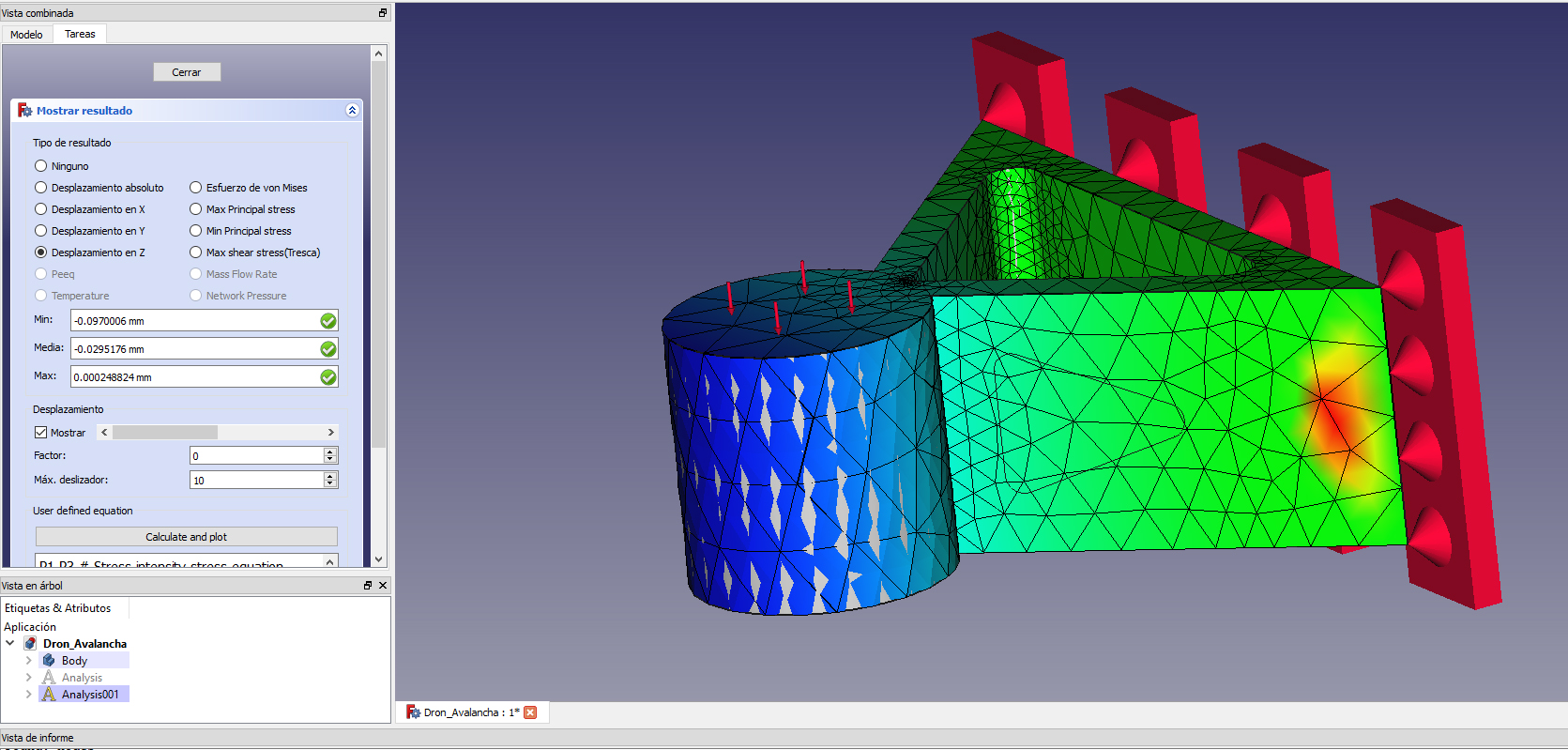
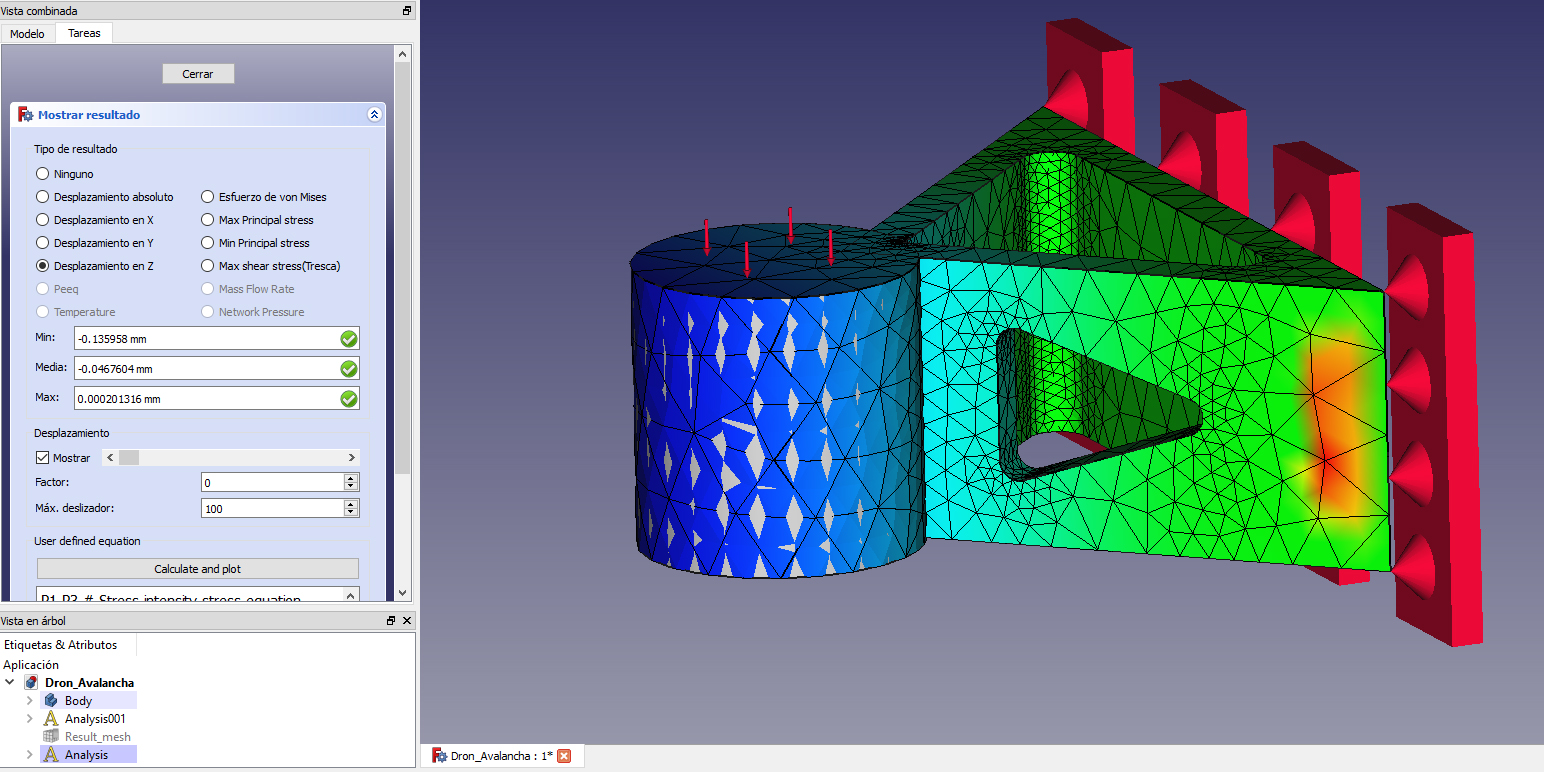
If you could accept one small tip, I would make a hole in each arm.
Less weight, less material, same strength. Displacement 20% higher, but yet very low.
 ) If you are into skiing or snowboarding, you might be familiar with these devices. These devices work, but are not trivial to operate. And in case of an avalanche, a human error can result in death. That’s why we are building the drone.
) If you are into skiing or snowboarding, you might be familiar with these devices. These devices work, but are not trivial to operate. And in case of an avalanche, a human error can result in death. That’s why we are building the drone.