HW/FW:
Pixhawk-1
FW: Arduplane 4.0.5
Taranis Mix Ch9 and 10 setup to control roll and pitch
Rx: 16CH Sbus
Aux1 Pin on Pixhawk connected to tilt
Aux2 pin on pixhawk connected to roll
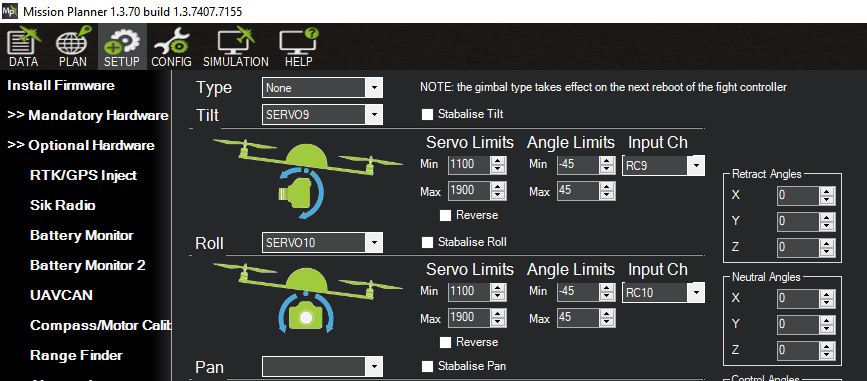
MP Setup:
Camera and Gimbal:
Tilt = Ch9, Input Ch9
Roll = Ch10, Input CH10
Based on all these setup I should be sending PWM pulse to the BGC controller but its not. I have used a servo tester to test the BGC controller and its working fine as well as the stabilization feature. I have also tried removing red wire going into the Aux output but no results.