So I’m swapping my old failing esc’s with some BLheli 32 and probably Dshot 600 protocol. Once I occupy AUX1-4, what happens to 5 and 6? I’m under the impression 5 and 6 can no longer be used for pulse width accessories like my parachute. So I’ll move the parachute to one of the mains. But is my camera trigger fine on AUX5 as it’s set to relay?
they are done in Dshot groups, on a pixhawk its aux 1-4 and aux 5+6 so if your using 1-4 for dshot then you can use aux 5 and 6 for GPIO.
You would need to specify which flight controller you have. Also check Messages and should say something similar to this at boot up:
RCOut: DS300:1-6 PWM:7-8 DS300:9-11
The assumption is anything not listed should be GPIO (usable Aux input/Output)
It’s a Pixhawk cube black. I just realized Dshot was AUX only lol! I thought the wiki diagram was just wrong at first. Been years since I’ve built anything, man stuff changes.
Let us know if you need help with the parameters. There’s now some more tuning steps (it seems like it anyway) but you end up with a better tune and you would do less manual tuning than previously.
In the BLHELI32 settings on the ESCs change Low RPM Power Protect = OFF
Be sure to set up the BLHELI/DSHOT telemetry data wire to a serial port.
And you’ll also be able to set up Harmonic Notch filtering before running Autotune.
You’ll need something like these
BRD_PWM_COUNT,4
SERVO1_FUNCTION,0
SERVO1_MAX,2000
SERVO1_MIN,1000
SERVO1_REVERSED,0
SERVO1_TRIM,1000
SERVO2_FUNCTION,0
SERVO2_MAX,2000
SERVO2_MIN,1000
SERVO2_REVERSED,0
SERVO2_TRIM,1000
SERVO3_FUNCTION,0
SERVO3_MAX,2000
SERVO3_MIN,1000
SERVO3_REVERSED,0
SERVO3_TRIM,1000
SERVO4_FUNCTION,0
SERVO4_MAX,2000
SERVO4_MIN,1000
SERVO4_REVERSED,0
SERVO4_TRIM,1000
MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
MOT_PWM_TYPE,4
SERIAL2_BAUD,115200
SERIAL2_OPTIONS,16
SERIAL2_PROTOCOL,16
SERVO10_FUNCTION,34
SERVO10_MAX,2000
SERVO10_MIN,1000
SERVO10_REVERSED,0
SERVO10_TRIM,1000
SERVO11_FUNCTION,35
SERVO11_MAX,2000
SERVO11_MIN,1000
SERVO11_REVERSED,0
SERVO11_TRIM,1000
SERVO12_FUNCTION,36
SERVO12_MAX,2000
SERVO12_MIN,1000
SERVO12_REVERSED,0
SERVO12_TRIM,1000
SERVO9_FUNCTION,33
SERVO9_MAX,2000
SERVO9_MIN,1000
SERVO9_REVERSED,0
SERVO9_TRIM,1000
SERVO_BLH_AUTO,1
INS_HNTCH_ENABLE,1
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
The assumption there is using serial 2 (telem 2) for the BLHELI telemetry data, you might like to use serial 4 instead. If the DHSOT telemetry is working you’ll see it in MissionPlanner data before you even fly, so see if you can get it all going before trying test flights.
You’ll need to refresh after setting the “enable” parameters to see the rest, and reboot after changing any of those servo functions around and check that they remain as expected.
You can copy all that into notepad and save as a .param file then just load it via MissionPlanner to save all the typing errors.
Let us know when you’ve done MissionPlanner motor tests and ready for test flights.
Thanks for all the help! I’m excited to try to harmonic notch filter. This particular quad had been mapping for about 5 years steady. Must have thousands of flight, but finally I started getting some yaw imbalance that I traced back to motors 1 and 2. Both esc’s were obviously over heating as the shrink wrap had melted. If this works well, I’m going to do the same thing with my 1400mm X8 for lidar scanning. It’s always had issues with the tune because of complex low frequency vibrations. Basically we never scanned in winds any higher than 10kph lol.
Also set
INS_LOG_BAT_MASK,7
INS_LOG_BAT_OPT,0
and do a short hover test and maybe some gentle movements, but nothing radical.
Let’s see that .bin log file and we can adjust the HNOTCH settings before moving on to Autotune.
EDIT:
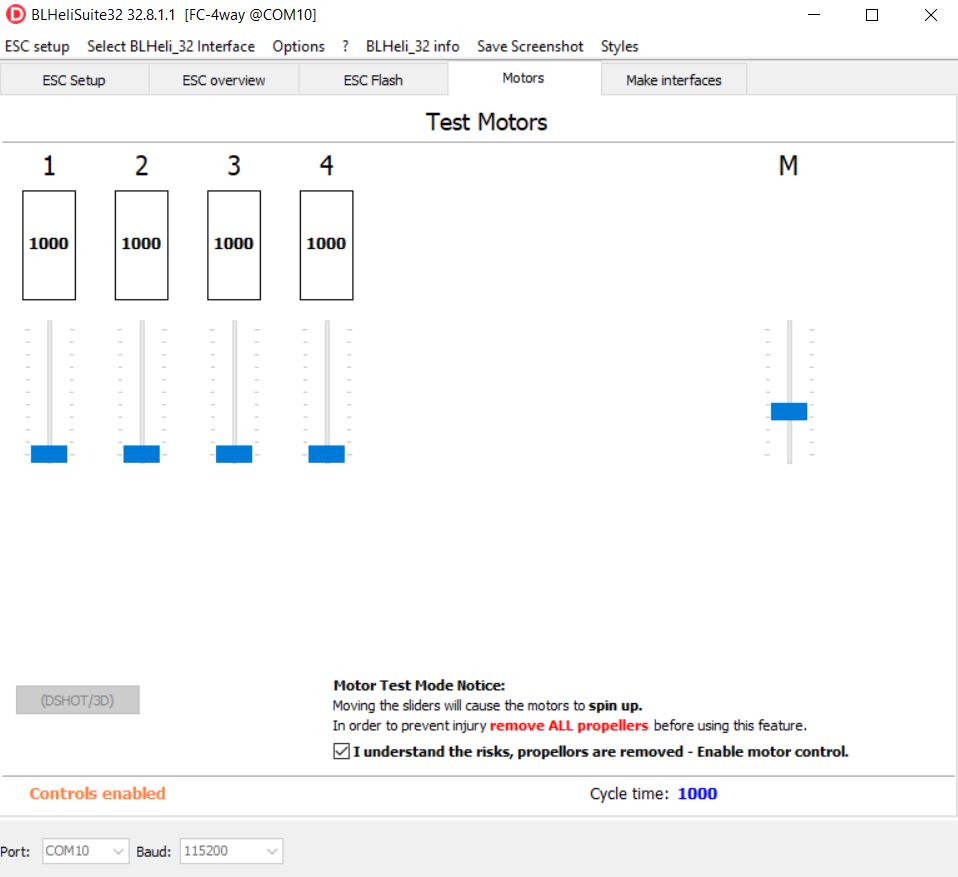
And MissionPlanner motor test is your best friend. More testing before flying = more flying, less crashing.
But you probably know all that 
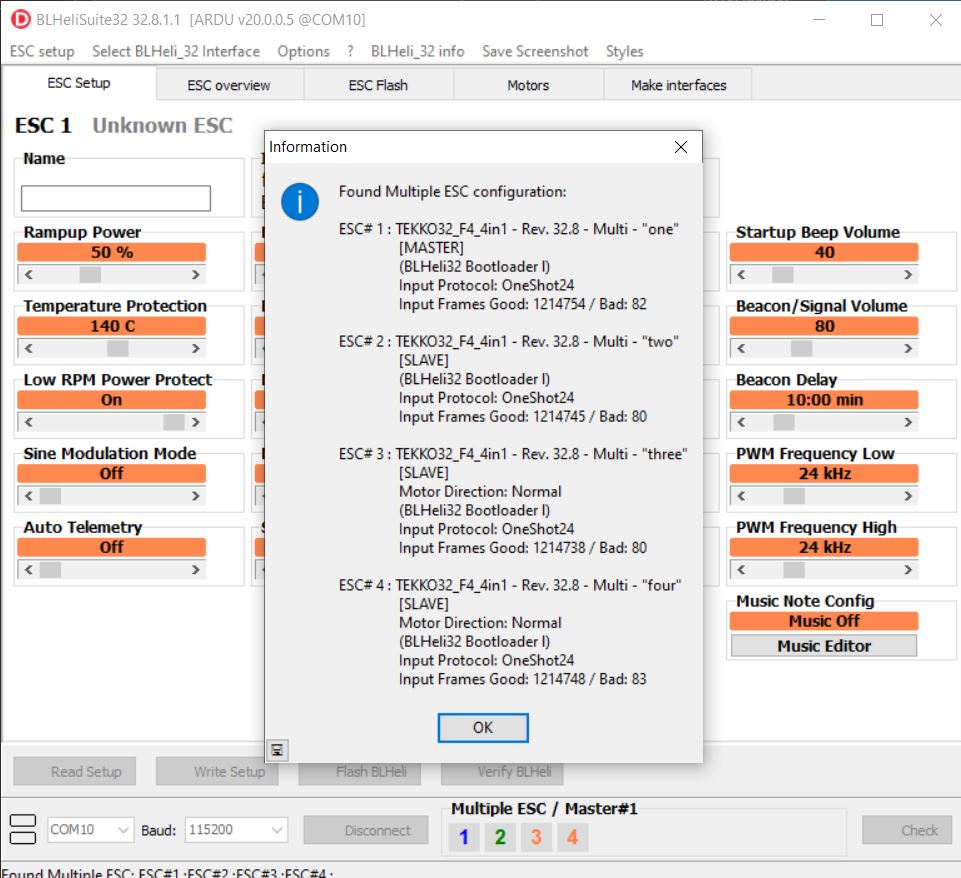
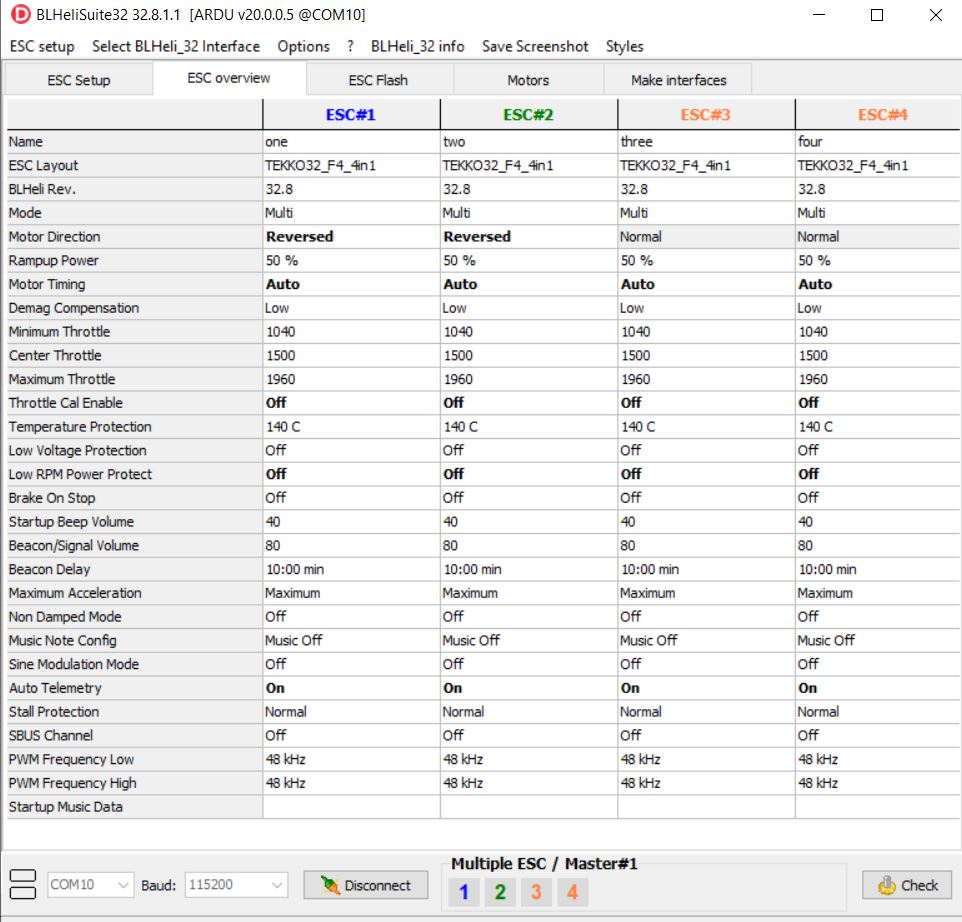
Motor test is definately your friend lol. The esc numbering on my Holybro Tekko32 F4 Metal 4in1 don’t in any way match my quad’s motor numbering. Everything seems to be working except my passthrough in BLHeli suite is reporting my protocol is oneshot 24. I don’t want to run oneshot and I’m pretty sure oneshot 24 doesn’t even exist. I set my cube to DShot 600. Weird. And not sure what the bad input frames are all about. I presume that’s bad. And now the cube is throwing PreArm: Internal errors 0x1000000 l:168 imu_reset errors constantly.
I think my main issue is for some reason the Holybro esc’s aren’t recognizing the Dshot protocol. The motors arm and spin, but won’t advance. Also, in Mission Planner you can see the motor 1-4 ouputs climbing at different rate trying to stabilize while moving the copter by hand. Eventually I’ll get a thrust loss error. All the time the motors are spinning nice a smooth, but at idle slow. I thought maybe the trim set at 1000 may be causing the issue, but at 1500 it’s the same. Of course when you look at the passthrough in BLheli suite, it’s still showing oneshot24 lol. I may have to tear this thing apart as I need to be working Tuesday. Or maybe I’ll just use a big hammer
Did you set Low RPM Power Protect = OFF in blheli settings?
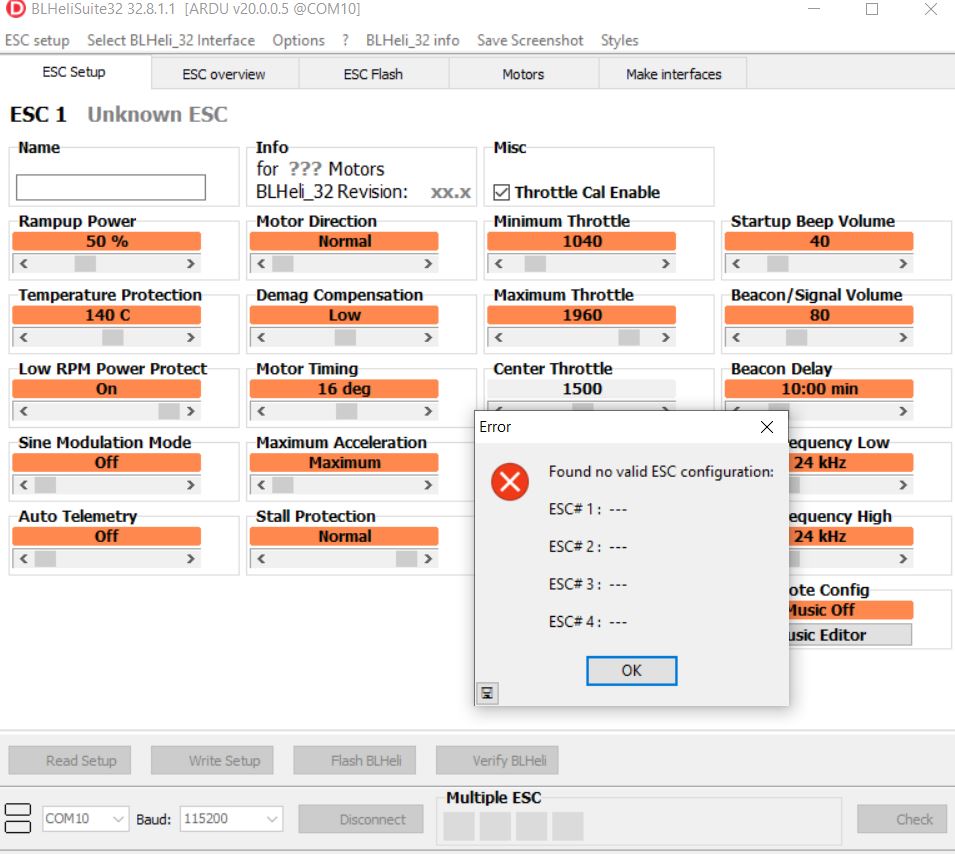
That’s funny. My blheli suite was showing off, but this morning it showed on. Set it to off again and now the motors spin as usual. Still shows one shot 24 as protocol. First read of esc’s always returns no configured esc’s. Second time it populates a list of all 4 with the oneshot 24 protocol. May just go out and see how it will fly. Can’t get the telemetry to work either. Tried serial 2 (telem2 port) and serial 5 (coms port). Set to protocol 16 for esc’s, but nothing. Maybe the baud rate is wrong. esc_motor_test|546x500
Can’t seem to find anywhere what the baud should be set to. Again, thanks for your help!

{kind=link}