I use arduplane 4.0.5 on Cube black.
I set BRD_PWM_COUNT = 6, RELAY_PIN=-1,
and set servo9_function = 1 (RC path through).
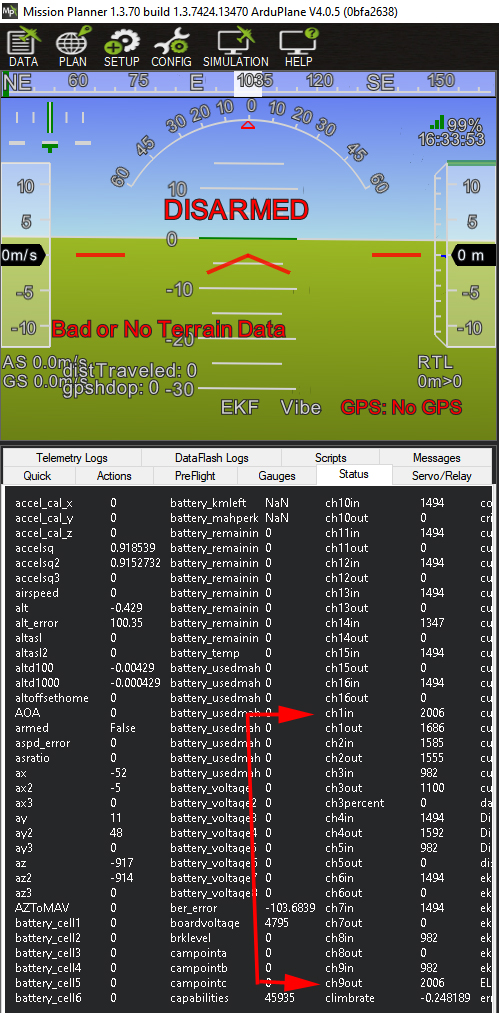
But, aux1 output 0 on status of mission planner.
Also I checked it on pixhawk1 with arducopter 3.6.12,
it was same.
Works for me on the bench. In the Status screen ch9out changes pwm with RC chan 1 input which is the roll (aileron) stick in the configuration. A servo connected to Aux9 also moves. This is with Copter but I don’t think it will make a difference with Plane.Post your parameter file.
I don’t know what the problem is. I set this up duplicating every parameter from your file that would affect this and it works. You have RCIN1 (51) set on Servo 9 & 10. When I move Chan 1 (Aileron/roll) both chan 9 & 10 change output on the status screen. Attached is my parameters, use Parameter Compare and figure out what’s different. I don’t see anything significant to this issue.
There is not a bug that I’m aware of and not sure what you found. This is the same configuration as you describe connected via telemetry. RCIN1 configured on Aux 9-14. All working fine. Perhaps you should update Mission Planner to Latest Beta.