My Quad is pretty big 80x60 cm and the Autotune was on a very unwindy day, less than 2 m/s.
Few days after, for the first flight with the autotuned PIDs, It was quite wobbling so i landed it and put the default PIDs and i way better.
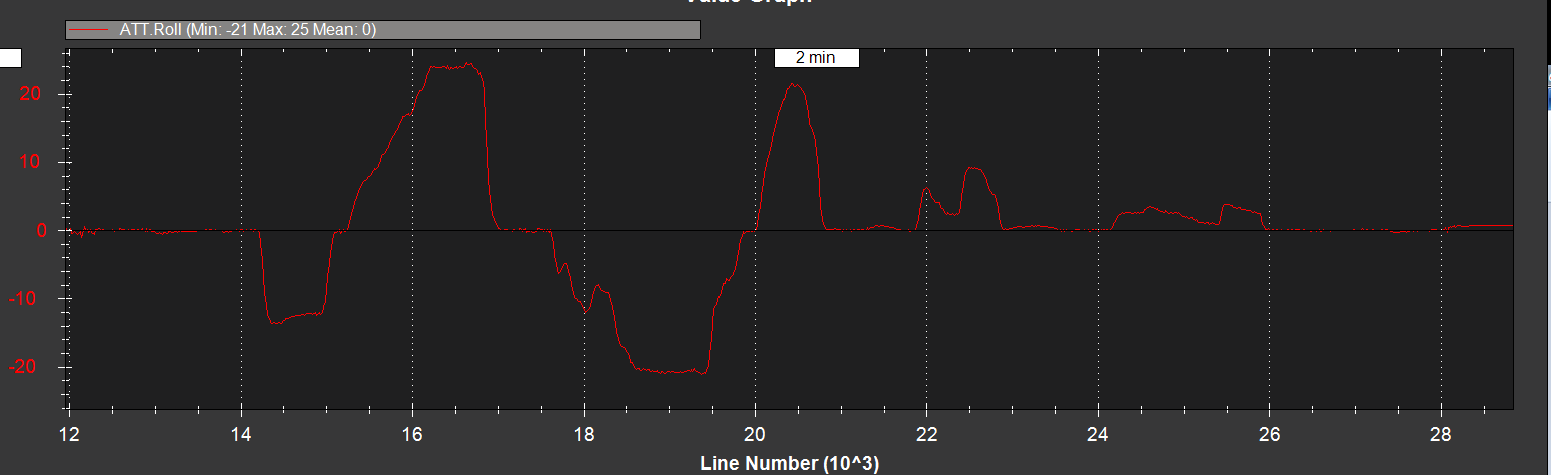
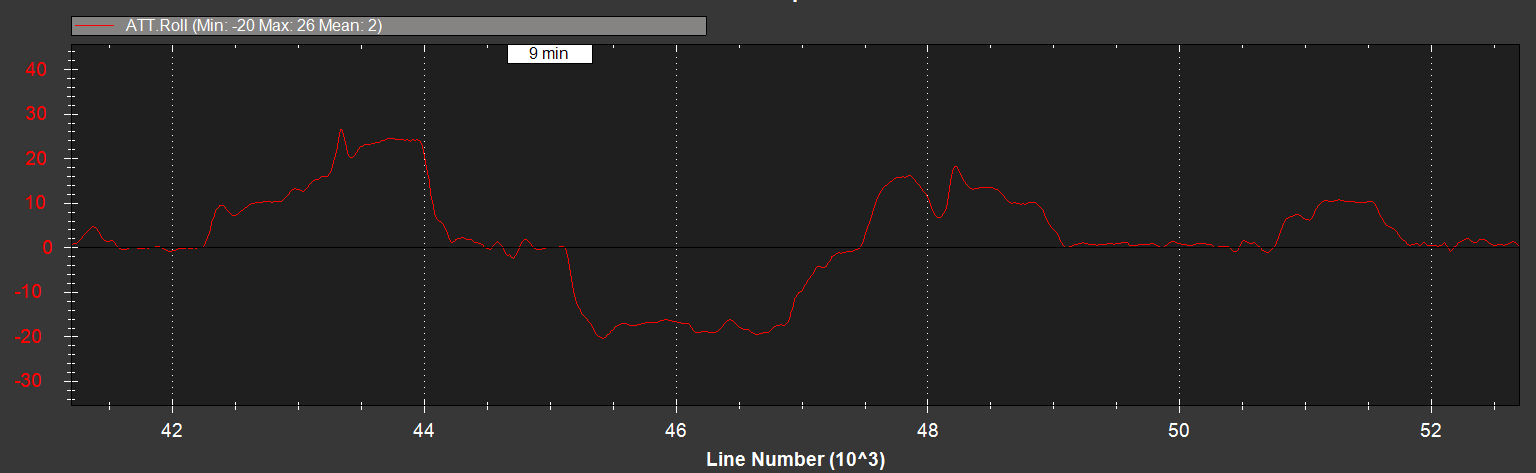
But when i looked at the Logs there was a problem. The Pitch and Roll were stable with the autotuned PIDs according to the Pixhawk whereas with the default PIDs the Pitch and Roll were wobbling in logs. That is excatly of what happenned.
Here is the Log of the Roll for example with autotuned PIDs :
There is often “Error compass variance” on my mission planner screen and i suspect that maybe there is one sensor that returns unproper information that causes the quad to wobble with autotuned PIDs, but for me it should be also wobbling with default PIDs.
At home i plugged the pixhawk and saw that Roll and Pitch were stable even with the motor working at 50% without porps ( to see if there was interferences ).
I am pretty lost and wonder if someone can help me
How do you have the Pixhawk mounted? Do you have vibration damping (i.e., vibration damping mount or even foam)? Wobbling can be caused from the FC not being isolated from vibrations. Can you plot your vibrations section of the log (both Vibrations and Vibrations 3.3?
If they are both flat then you will need to enable the IMU setting in the log bitmask to capture that information.
My Pixhawk is mounted with Velcro directly on the frame of the quad.
i’ll enable the IMU for the logs for the next fligh so we can see if vibration dampings are necessary .
There was also a problem about the yaw rotation that was making the quad loosing altitude clockwise but not anti-clockwise. I checked the RPM of the motors with props individualy and the anti-clockwise motors are giving both 8000 - 8100 RPM at full throttle while the clockwise ones are giving 7700 - 8000 RPM.
I got a X Frame Quad.
autotune_bitmask. Each axis has a value - roll=1, pitch=2, yaw =4. If you want all three then the mask needs to be 7 (1+2+4=7). Any other combo you just take those values and add them. If you want just roll and pitch the bitmask needs to be 3. Just yaw and the bitmask needs to be 4. This is a pretty new setting and I believe specific to 3.3.x Copter and above as autotuning in 3.2 and below was just for roll and pitch and you couldn’t separate them.
hi
i fly a S900 with pixhawk and i had the same issue, with the autotune value, it was not stable, so i get back to default values and it was ok . i dont have any issue with the vibration but my pixhawk is attach on some foam…
so no prob to fly with the default setting.
good luck
FThe autotune PIDs you got are similar to mine, but I do not get the wobblies.
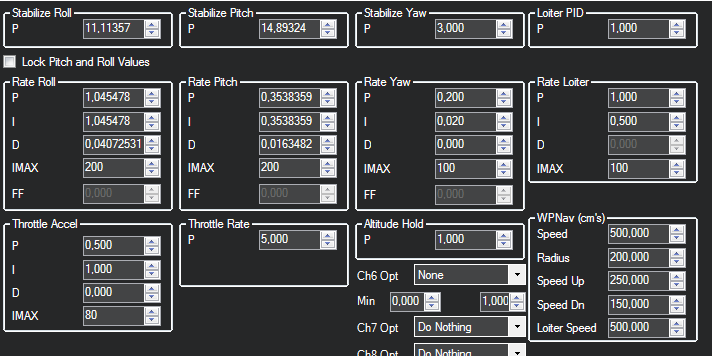
But my comment relates to the actual values we get:
1 why would the Rate P & I values be identical?
2 why would the Stabilize P values be approx 3x the defaults?

 .
.