I think there is something funky going on during the autotune process. On 2 separate occassions I had the same drone drop to the ground during the Yaw portion of a Roll/Pitch/Yaw auto-tune session. They fell in similar fashion and I’m struggling to see how it can be mechanical/electronic. Thankfully I have full logs of both. Visually - I’m trying to recall, but I thought what I saw was the drone pitch forward and to the right as if motor 1 lost thrust but in both logs it shows motor 2 drop out? Vibes all look good. The drone flies great otherwise, which is what is kinda telling me something is going on in autotune land.
Could use another set of eyes on the logs to see what could be going on.
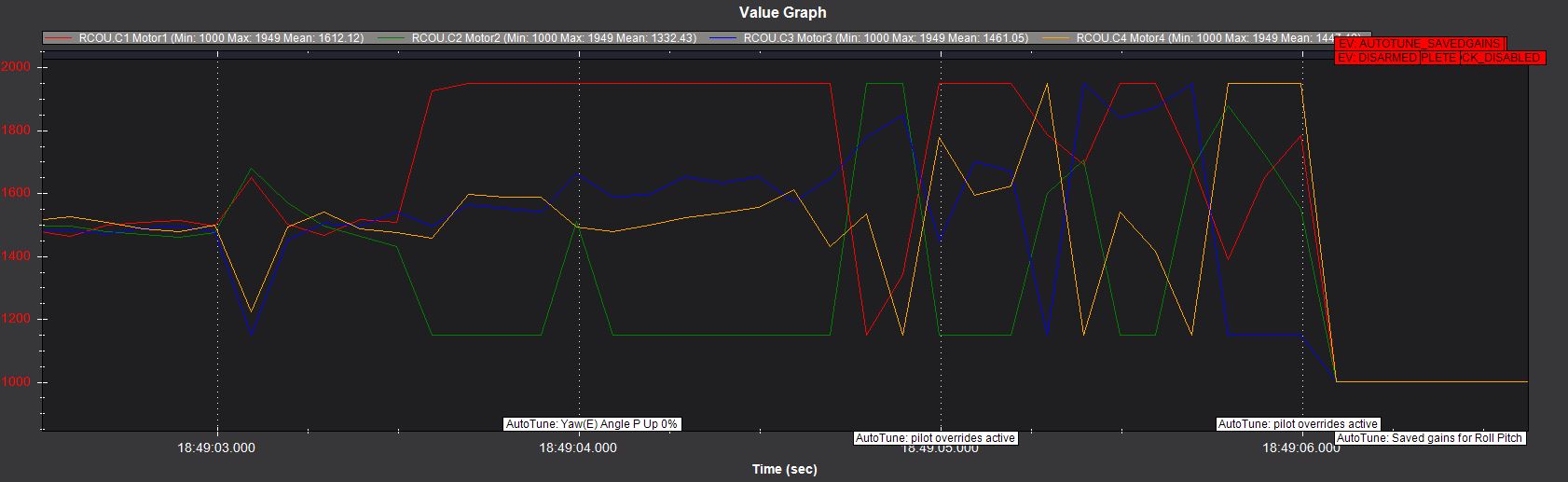
Yea but why does it only happen during the yaw portion of auto tune , twice? Isn’t that odd? And it doesn’t happen during just a yaw auto tune, it happened after roll and pitch. Also, esc rpms dropped after RCOU dropped. If motor 1 died temporarily, I’d expect the opposite.
If the motors get really really hot they will loose efficiency.
Did you evaluate the tune like explained in the wiki before doing autotune. Have you done single axis yaw autotune with a fresh battery?