Hi @bnsgeyer
recently, I update my firmware from 4.3.3 to 4.3.5,
when I try autotune for
AUTOTUNE_AXES 3 (Roll and Pitch)
AUTOTUNE_SEQ 1 (feedforward)
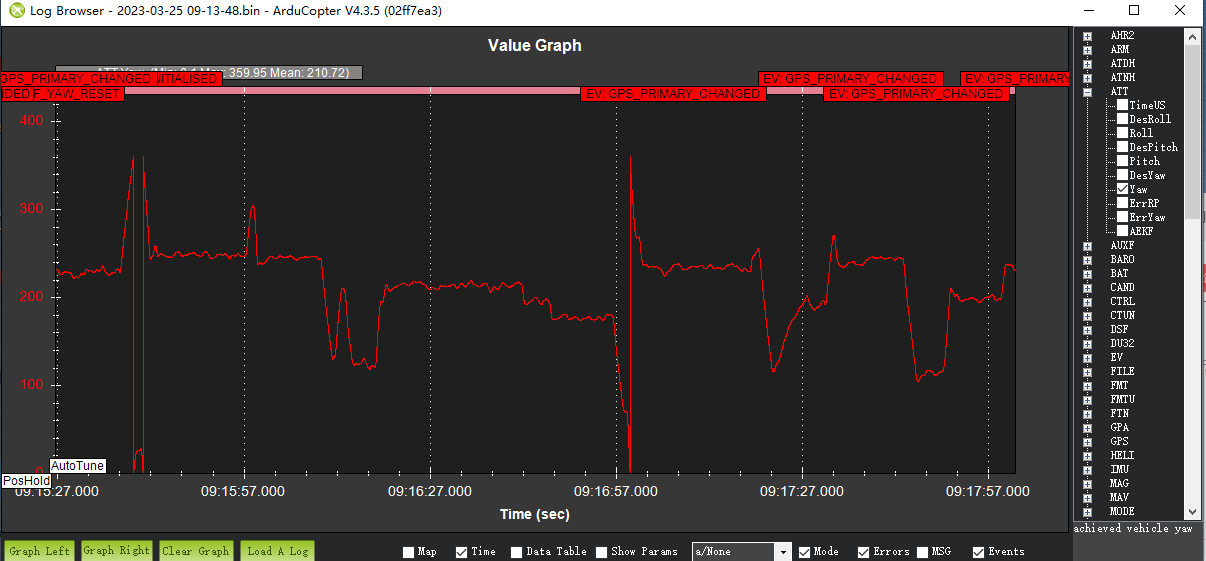
the helicopter start to roll left and right, after that, helicotper change the direction, maybe 90 degree, and start to roll left and right again, that is quite strange than before
you could see that in log
https://drive.google.com/file/d/1eiYxfIiIkkeIUxNoJ4lpsRfmPuVF3Rq-/view?usp=sharing
@jinchengde I am pretty certain this is because you are entering autotune from loiter mode. When you enter autotune from a position stabilized mode, like a loiter, it will sense any drift in the vehicle as being caused by wind. Therefore it will then turn the aircraft 90° to that drift in order to keep the axis being tuned from being affected by the wind.
I recommend you, enter auto tune from stabilize or althold rather than loiter. Especially in tuning the feedforward gains because the aircraft tends to drift more due to the type of input being made.
1 Like
Running an initial autotune in a bit of wind using loiter is often better than nothing. But you’d best try again using altitude hold when the wind is calm.
exactly, I will try althold mode for autotune
I ran into the same behaviour on the latest firmware version as well.( mind you this was the first time running an auto tune on this build) Machine was in alt hold mode, switched to auto tune for feed forward on pitch and roll. Mind you it wasn’t dead calm (10kmh). The machine would yaw maybe 45 degrees, pause then yaw some more, pause then yaw again. It would do this after every time I repositioned it. I never got a chance to complete the run. Will try again on a calmer warmer day (still lovely winter ish weather here in Canada )
600 Trex flybar head
Cube orange