I’ve tried autotuning another plane SpeedyBee F405 wing mini based flying wing. Here are the settings I’ve recently tried (and got the same problems, but much worse):
INS_GYRO_FILTER = 30
SCHED_LOOP_RATE = 100
RLL_RATE_SMAX and PTCH_RATE_SMAX = 150
AUTOTUNE_LEVEL = 7
PTCH2SRV_RMAX_UP and PTCH2SRV_RMAX_DN = 90
RLL2SRV_RMAX = 180
I’m looking for guidance on what to adjust and, more importantly, why - so I can understand how to properly tune it myself.
Also, how do I reset the autotune settings to default? Do I need to reset specific parameters, or can I simply enable it and start autotuning again? I’ve included my logs: Log2 shows autotuning, and Log3 is a flight using the newly acquired PIDs with a stall .
After trying different combinations of SMAX, SCALING_SPEED, AUTOTUNE_LEVEL, SCHED_LOOP, SERVO_RATE, I must admit that I’m stuck.
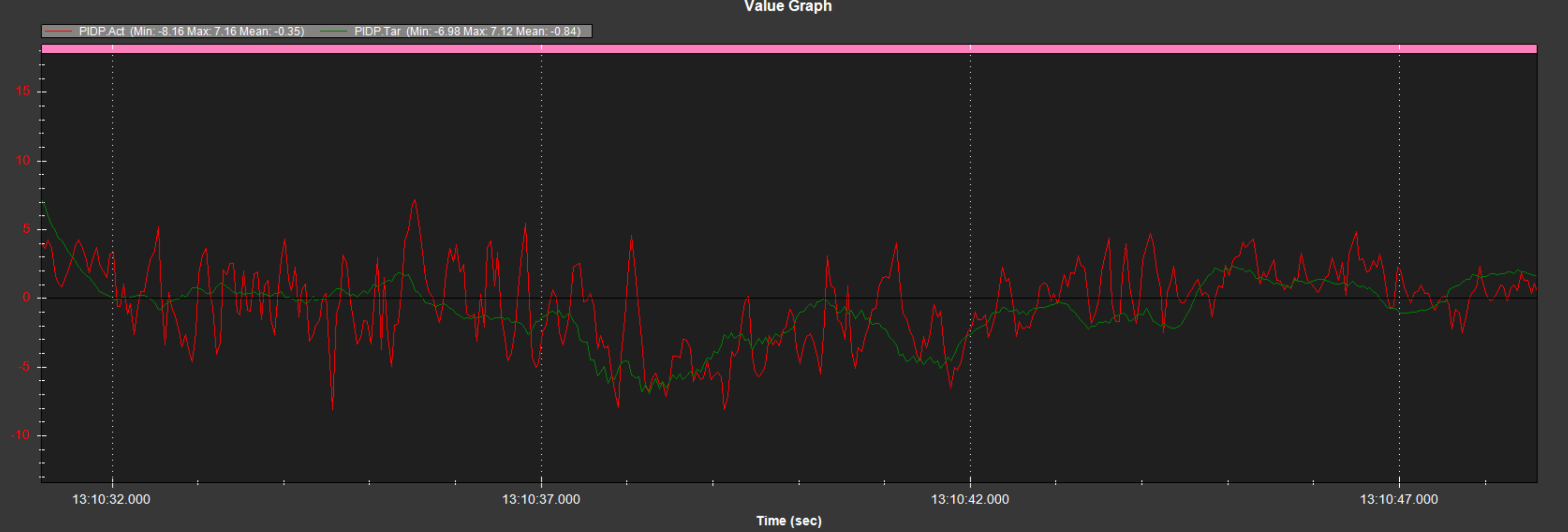
My vibrations are low, still the PID actual is pretty bad. What do I do? Here is my best tune so far(yeah, it is pretty bad)
(Reason for editing: Sorry, I had overlooked the fact that autotune was finished. I deleted the sentence.)
In the last log file, [deleted] the scaling_speed of 12 m/s does not match the much higher cruising speed. But you have written that you have tweaked all possible parameters because of the high elongations (and now only have a small phygoid of a few degrees in guided mode), but no good consistency of pitch and / or roll. I would go back to the start, with default parameters, then make sure that the speeds are set correctly and that the ailerons (in manual mode) have the correct centre position and the CG is correct. Perform the autotune long enough and then see how the aircraft reacts in FBWA. The vibration level is very low and was certainly not the cause.
Thanks for suggestions. I think I fixed most of the problems. CG is a bit too forward, but it is intended.
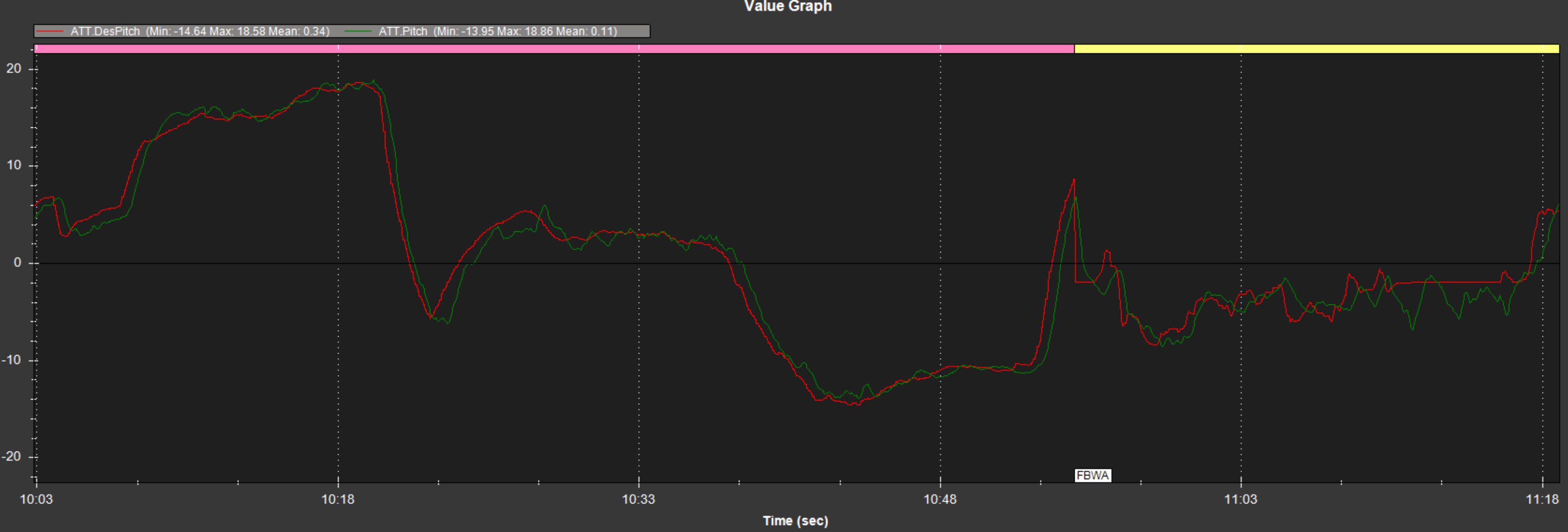
I finally got better weather and was able to fly it again. In this log I have a few autotune sessions with different autotune_level. Filebin | eupad5p09e08viii
It is much smoother now. Roll is good, Pitch is a bit jumpy. And both axis are noisy in the graphs.
It’s a bit strange that I have the same nervous pitch axis on a completely different plane—the twin motor with tail (T1 Ranger). Yet, it remains very stable even without any stabilization(in manual it doesn’t have that). Additionally, there’s noise in its graphs too. Filebin | r3qvshmz7n8bczkh