I tried AutoTune now several times(250 class) and the results are all dangerous.
Firstly, the Tuning takes ages and the result is not even close to be flyable.
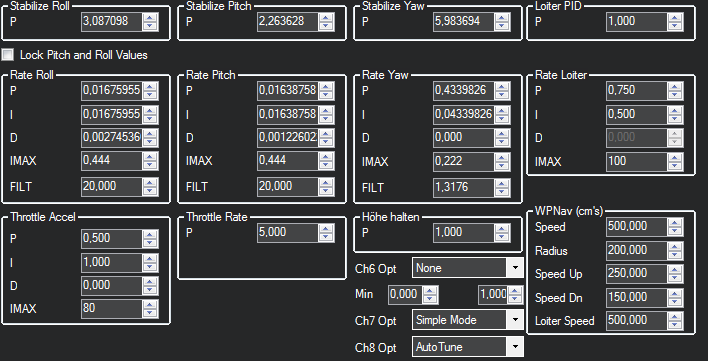
See the picture.
The reason for this is that the function changes all PIDs without taking care about the user input.
I mean, the PIDs need to consider the error between input and current angle. The algorithm happily changes all of them at once only considering the attitude. This is not how it can ever work.
I understand your point of view, however I like the approach and the overall idea of autotune. It is great to have the autopilot controller itself to deal with the complicated PID setup and all related parameters.
Not all users ( including myself ) are able to do a proper PID finetune and have such a tool can allow those pilots to have a better solution for that.
I know it sometimes doesn’t work as expected, specially on 250 racers but I believe there as those machines are becoming very popular, there are devs looking at it.
Of course you are free to test and accept the values right after the autotune and stay with them or revert to the old after the session, so I believe it doesn’t bring any risk by itself. For that I strongly support the autotune development.
I’m sure I’ve read somewhere that you need to tune the autotune and filter parameters to get the most of it on small machines. I’ve bought an 250 on HK and I’m assembling it right now, so in a few day I will be able to test by myself and maybe help you or face the same difficult you are facing. Will revert asap .
I have doubts how tuning two PIDs at once without user input can work. I would probably not trust this system until there is at least some response test to the control input. otherwise the copter might get stabilized but is uncontrollable.
+1 not to removed, you can use if you want or manual tunning if it is your preference, I spend some time with my 250 autotune not working, I ask many times, post many logs, try many devs and users suggestions and now looks working.
With my 11" prop model it doesn’t work as well, and I am sceptical. Guess, I wouldn’t risk using it on my bigger copter just because the outcome is not worth risking money
Search If there’s something loosen in your setup that can bounce, like batteries. They mess up with AT. If that’s not the case, try to harden a little bit the autopilot damping and run it again. Those tips had helped me.