I try autotune roll axis only (set to 1) but nothing happens 3.4 with a pixracer.on a robocat 270
I have autotune in a switch
Alt hold looks good, only yaw have little movements I don’t know why yet, it’s a new build
Tomorrow I’m going to try with all tree axes (7) to see what happens but I don’t have enought flying time I hope.
Here my log
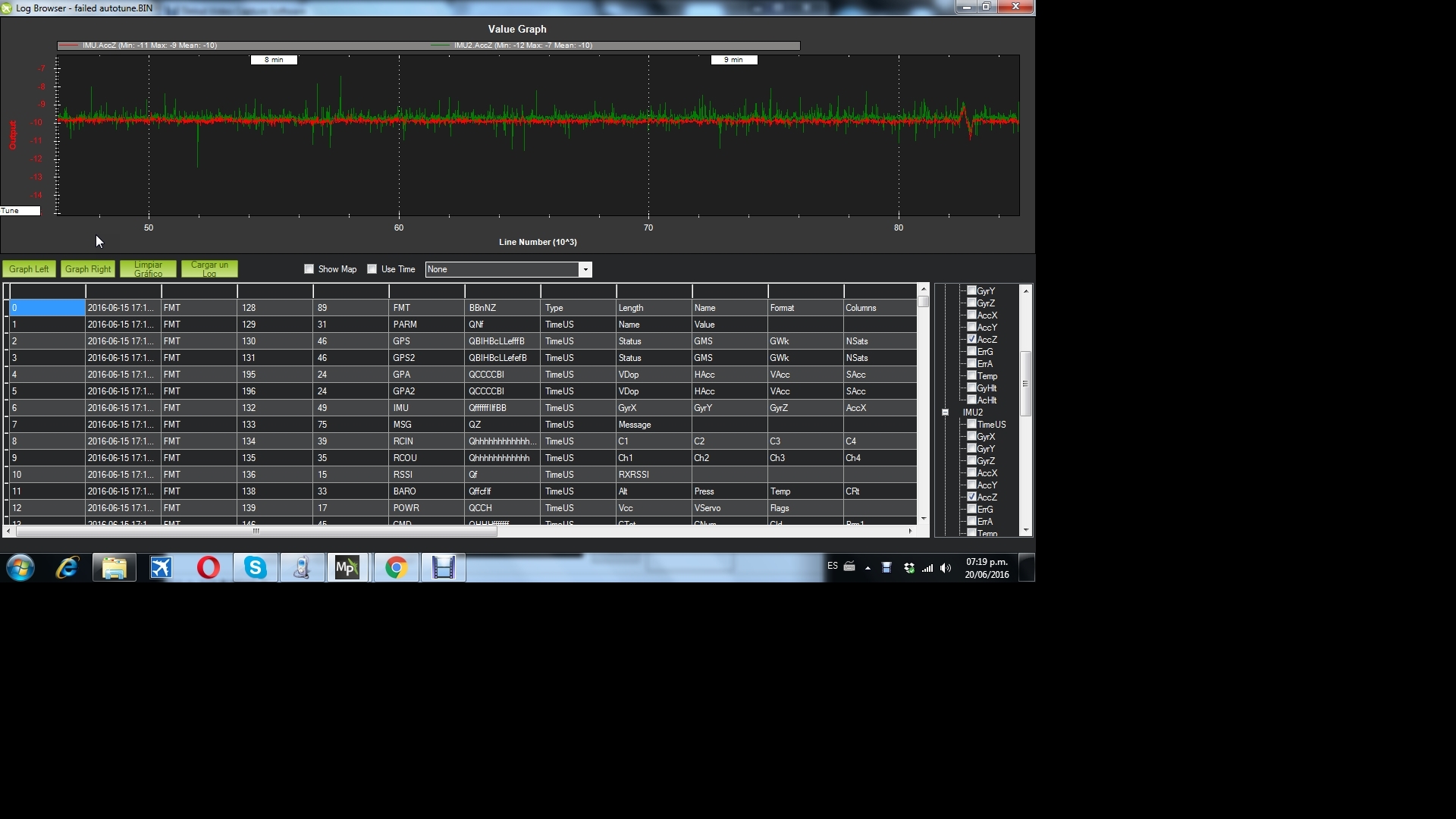
I disable IMU2 because looks worse AccZ and try again Autotune, now works like normal AT but with very short movements, the copter flies well in alt hold, pos hold, RTL, land and fast speed without loosing altitude (18 m/s) I’m happy with my quad but intrigate why autotune don’t work correct