Hi,
I followed the procedure below to set up and tune my VTOL. The whole procedure went well.
However, I finished with a QAutotune procedure, to fine-tune my PID parameters.
I carried out this procedure on each axis. When I did the pitch axis, my VTOL literally flipped over, following a 60 degree pitch backwards, to end up on the ground.
I analyzed the flight logs. I have several questions:
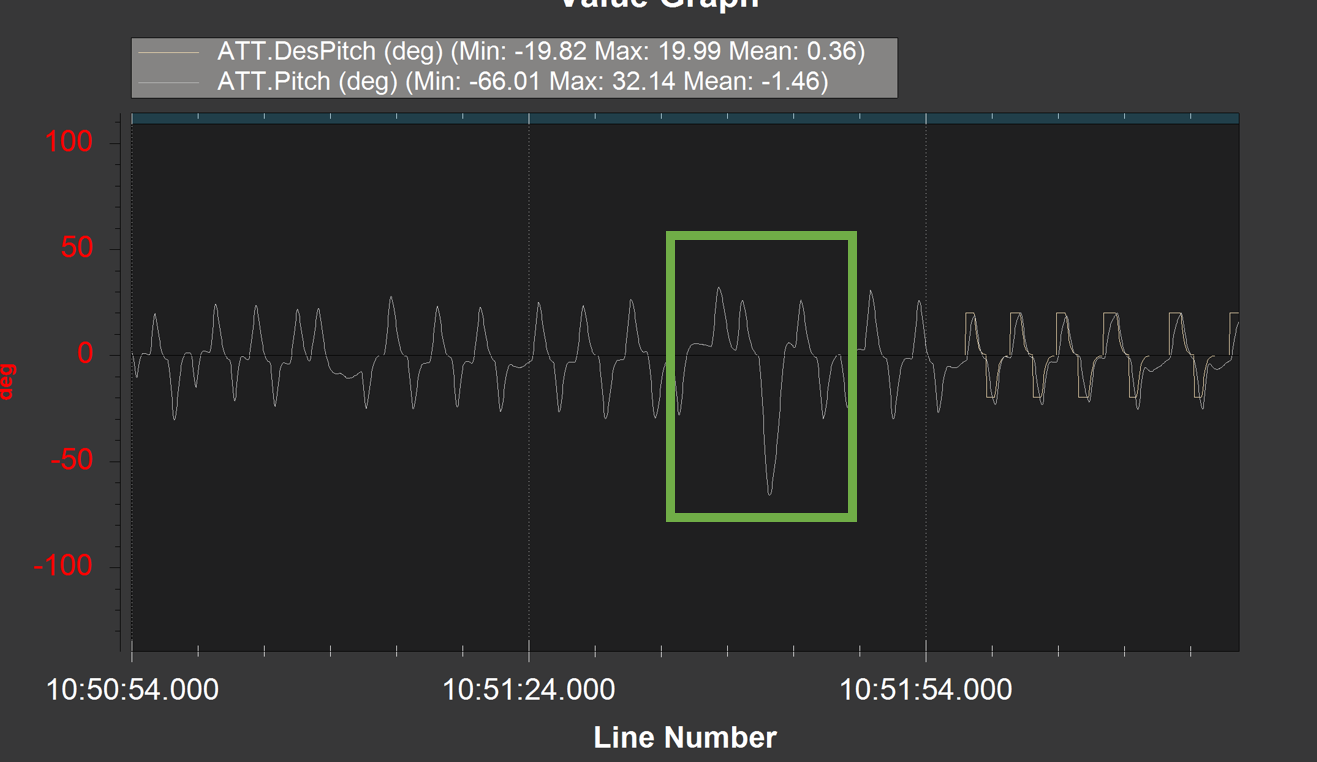
During the first phase (angle set point = 0, measured angle non-null):
- How to limit the angles taken by the drone during the autotune? (as I said, 60°!)(see green circled area)
- Can the Q_A_RATE_P_MAX parameter help to decrease the amplitudes ?
During the second phase (angle setpoint != 0):
3. The drone takes a lot of angle again (+ 20°) do you have an explanation ? How to avoid this ?
4. If we decrease the parameter Q_ANGLE_MAX, can it help ? Has anyone ever tried to set a value below 1000, despite the range defined in Mission Planner?
Finally, in the logs, I have the “PIQP” data:
5. SRate: What is this parameter? How does it affect the control loop?
6. Dmod : What is this parameter ? How does it affect the control loop?
Thanks a lot for the help!