Hi everyone, I’m a beginner, I have some questions of autotune, hope you can help me to figure out, I’ll appreciate with your kindly help.
The following is my equipment:
Aircraft hardware configuration
DJI S900
Motor DJI 4114 400KV
Paddle DJI 1552
3DR PixHawk
firmware Copter 3.4.1
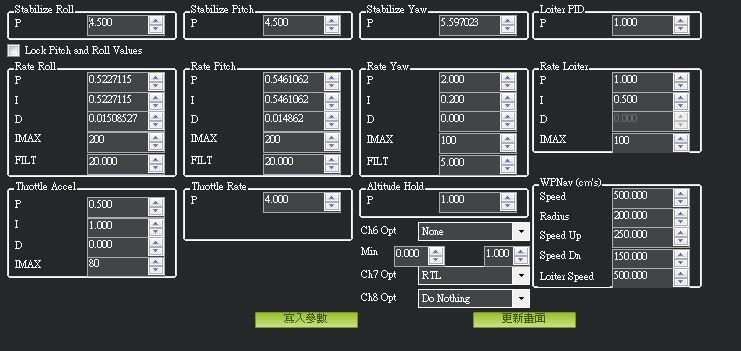
Here’s the question, I use two version, “firmware Copter 3.3.3 autotune” and “firmware Copter 3.4.1 autotune” to adjust Rate Roll、 Rate Pitch and Rate Yaw, why thery have so much difference? Is that normal phenomenon? Will that be able to resis instand gusts? ( please see the attached pics)
there was a large refactoring of that area between 3.3.x and 3.4.x versions. For those that choose to migrate the firmware should handle the conversion of the old settings to the new settings. As a rule of thumb that I use I always redo the calibrations when flashing new versions.