I am obviously doing something wrong here, but I cannot figure out what …
I have just attempted another autotune of the yaw axis of my 520 quad and all went well. The autotune finished and I carefully followed the steps in the wiki:
I flicked the ch7 switch to low and back to high to test the tuned PIDs and the yaw performance was noticeably crisper and tighter.
I then changed the flight mode from Altitude Hold to Stabilize, landed the quad and disarmed.
I rearmed the quad and did a short flight to verify that the new PIDs were in use, and they were.
So I landed again, disarmed and powered the quad off.
After I powered the quad back on, armed and flew it again, it was obvious that the PIDs had reverted to their default values … and had not been saved.
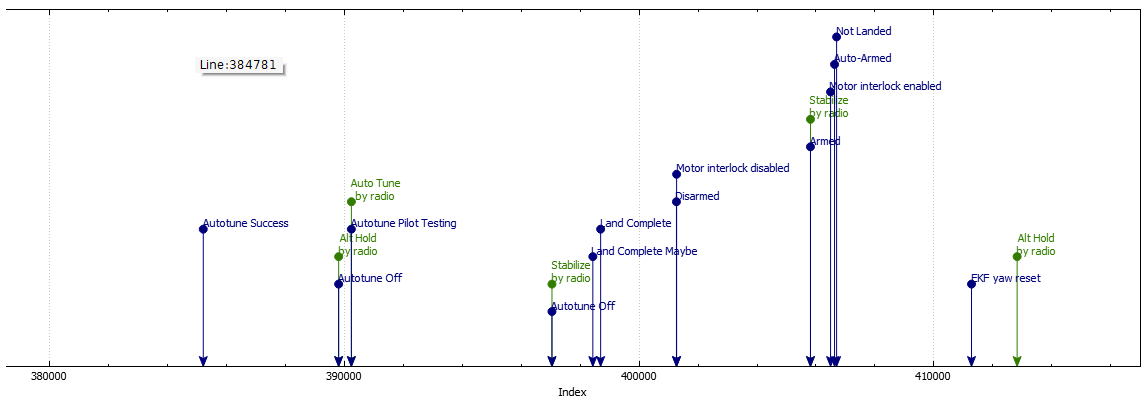
Here is what I think is the relevant section of the log file and there is no mention of the new PIDs getting saved:
What it looks like to me is that when I switched from Altitude Hold mode to Stabilise mode to land the quad, Autotune was turned OFF by the FC. Is that correct?
If it is correct, am I supposed to land with Altitude Hold still on?
Since the quad is in Altitude Hold mode while Autotune is active, should these steps work:
Once Autotune has successfully completed, switch ch7 to low, change flight mode back to Stabilise, switch ch7 to high to use the new PIDs, then land and disarm?
Once I switched to Altitude Hold, I switched ch7 high to start autotune, switched ch7 low and high again when autotune had finished to invoke the new PIDs and then landed and disarmed while still in Altitude Hold mode. PIDs were successfully saved.
The instructions in the wiki are logically correct, but I think they need to empasise that the craft must remain in Altitude Hold until disarmed in order to save the PIDs.