Definitely update to latest stable firmware first - there’s important fixes for Cube Orange and others.
It seems like it couldnt handle the demands of Autotune, got into oscillations and when down.
Looks like you want to use DSHOT, which would be desirable. You’ll need to move the motor outputs from Main Out 1 (Servo1) to Aux Out 1 (Servo9) and so on…
You can use the Servo output screen in MissionPlanner.
Also change these related settings:
SERVO_DSHOT_ESC,1
MOT_SPIN_ARM,0.10
MOT_SPIN_MIN,0.13
Use MissionPlanner motor test to verify the motors will start up reliably and smoothly at that MOT_SPIN_ARM value.
Hover thrust will need time to relearn in AltHold or Loiter.
Also join the telemetry wires from the ESCs all into one and connect to Telem4 RX pin and set:
SERIAL4_BAUD,115
SERIAL4_OPTIONS,16
SERIAL4_PROTOCOL,16
Now for other settings related to stability:
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.16
INS_HNTCH_FREQ,60
INS_HNTCH_BW,30
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.56
PSC_ACCZ_P,0.28
Alternatively if you get the ESC telemetry going just alter these ones from of their values listed above
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
And some PID adjustment that might help:
ATC_ANG_RLL_P,6.0
ATC_ANG_PIT_P,6.0
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_D,0.006
ATC_RAT_PIT_P,0.12
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_D,0.006
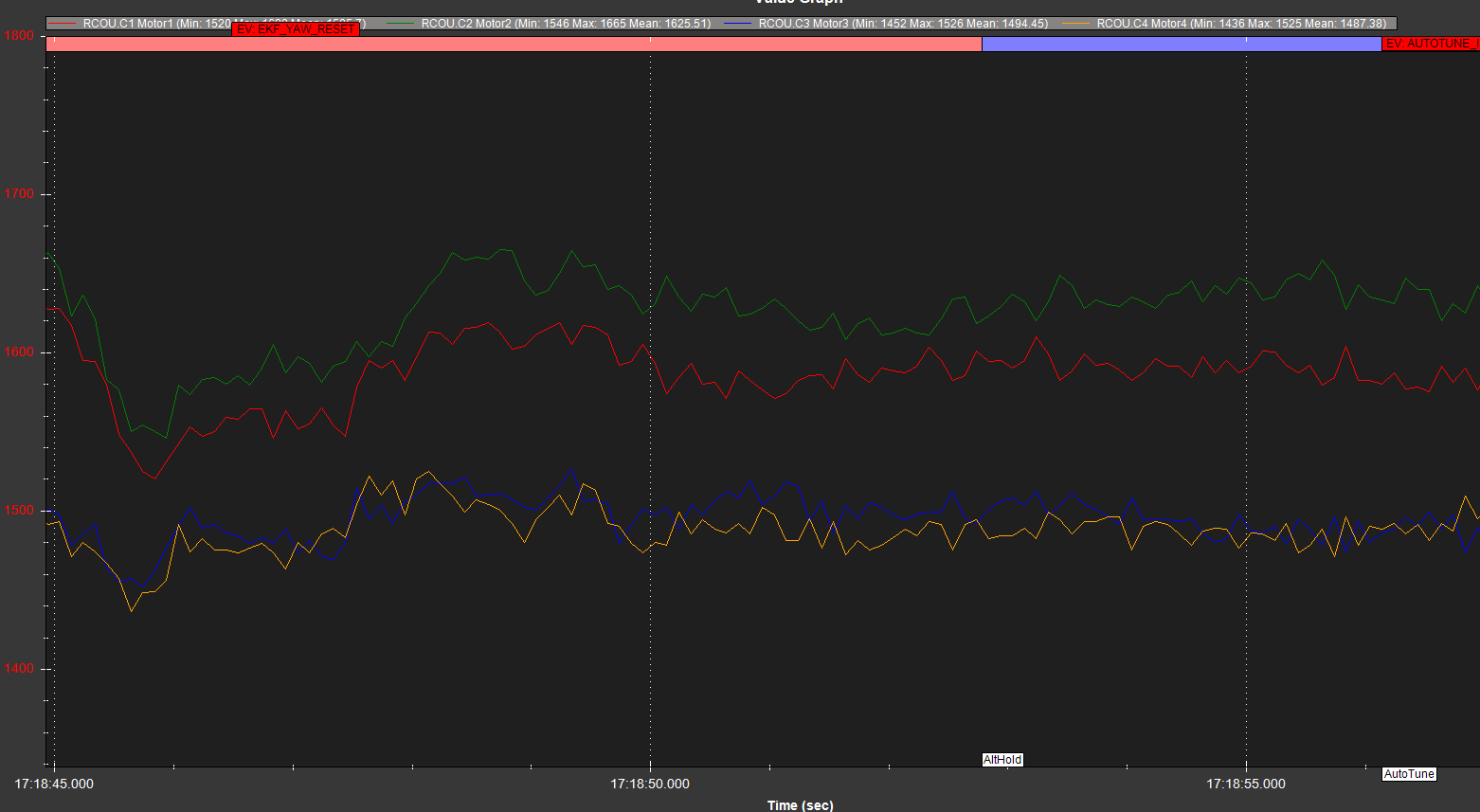
Something to physically fix is the motor alignment. In the log we can see a physical yaw bias caused by a twisted motor mount. Motors 1 and 2 (CCW) are working harder than 3 and 4 (CW) to counteract to yaw bias.
Rotate the props so the tips are all near other prop tips, or since this is a quad make the props into a square shape. Then look from the side, in the same plane the props would spin, and look for prop tips that dont align with neighboring tips.
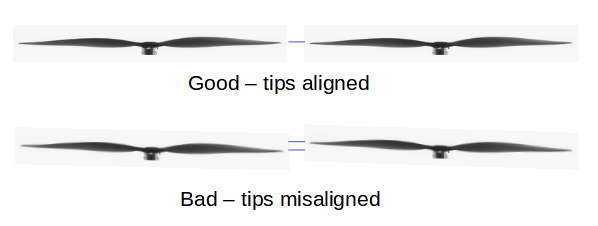
Adjust the motor mounts so all the props are spinning on exactly the same plane.
Once the copter is ready for flight again, just take off in AltHold and hover for a while, maybe some gentle movements, and let’s see that .bin log file.