I’ve been challenged getting my new Hexsoon EDU-450 V2 tuned with autotune.
I built the “V1” of this copter over a year ago - it had no trouble with autotune. It would complete all 3 axis within the 20 minute flight time of the 5200mah battery.
So far, I’ve been unable to complete autotune on even one axis on the V2 version of this copter.
Using values from the V1, the Mission Planner stored parameters for the EDU-450, the firmware defaults and some manual adjustments, I was able to come up with PIDs that allow for stable flight.
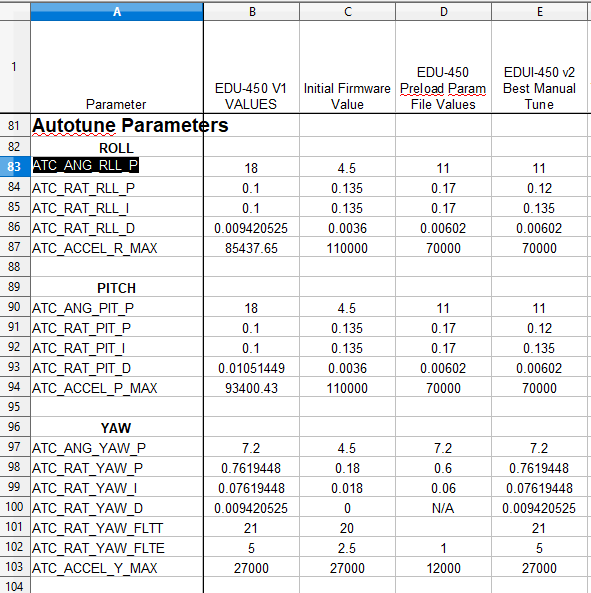
The copter behaves pretty well with this set of parameters - but as the data show it’s not yet tuned well:

Late yesterday afternoon, in perfectly calm winds, I made another autotune attempt. First I started from LOITER - but after a few minutes of the copter sitting perfectly stationary in flight, it produced no twitches.
I landed, switched to Altitude Hold, took off, and tried auto tune again. This time I got some twitches - but there were so many “Autotune - failure to level” messages, there weren’t enough twitches to complete the one axis I had set for Autotune to perform. Here’s the log from that flight:
My hope was to begin learning how to tune my copters to a finer degree than autotune. But as I can’t seem to even get this copter tuned well enough for autotune to complete, I’m facing quite a challenge.
I’ve read the substantial past threads on this topic such as this one:
But I’m still at a loss.
Is it possible that when autotune was changed to include the message “Autotune - failure to level” that something else changed that made autotune more difficult to use?
Regardless, I’d greatly appreciate some guidance on how to make progress on my tuning efforts.
Thank you.