With this setup drone fly good with default parameters. No visible oscillations. When I try to Autotune this message occurs and drone doesnt make any dancing.
Hello, I am sorry to tell you but no, it is not flying good with default parameters. Otherwise you would not get that message.
You need to configure it properly and then it will autotune fine.
The good news is that it is very easy to configure it properly. Just use the ArduPilot methodic configurator software.it was designed especially for you. To let new users get a properly tuned copter as fast and as safety as possible.
Thank you @amilcarlucas for your reply and ArduPilot methodic configurator software you made.
But I am not familiar all off the concept. If I use APM 2.8 instead of pixhawk, Autotune is completed and the drone can fly without any problems. I bought a Pixhawk because Pixhawk was highly recommended on the forum instead of APM, and I can’t Autotune. I don’t see any visible vibration, but the drone cannot enter Autotune mode. You can accept it as a humble criticism, if so many parameters have to be changed, which would be very difficult for an amateur like me, I think the job becomes a little bit more than “Auto”.
Still, I would like to thank you very much for your effort and support. Best regards.
Because you are an amateur (like you said) and do not know what to do and do not know the sequence of steps to do, you must follow a sequence that is simple and proven.
The software was designed for you.
It will tell you the sequence of steps, and it will set some of the parameters automatically, but you still need to read some of the documentation (that is clearly displayed on the software) and need to choose parameter values that meet you vehicle requirements.
Not configuring it properly was the root of your problem.
Attack the problem by the root, do it properly. And methodically.
The proper first step is to read the Blog post and use the software.
That’s too bad. Nothing from Radiolink is recommended. Download the .apj file from here fmuv3
Then use Mission planners “load Custom Firmware” to flash it.
This is old info. V4.0 is from 2020. I suggest you contact Radiolink for help. And while doing so ask them why they are not abiding by the Ardupilot GPLv3 license.
There are other 2.4.8’s around that only have one IMU also. All of them will work with either fmuv3 or Pixhawk1 unless it’s a rare 2.4.8 labeled 1mb version, which we have seen, which would use Pixhawk1-1M.
Avoid all of them but avoid anything from Radiolink.
I bought this pixhawk second hand for its price.
Ok i will install fmuv3 tomorrow.
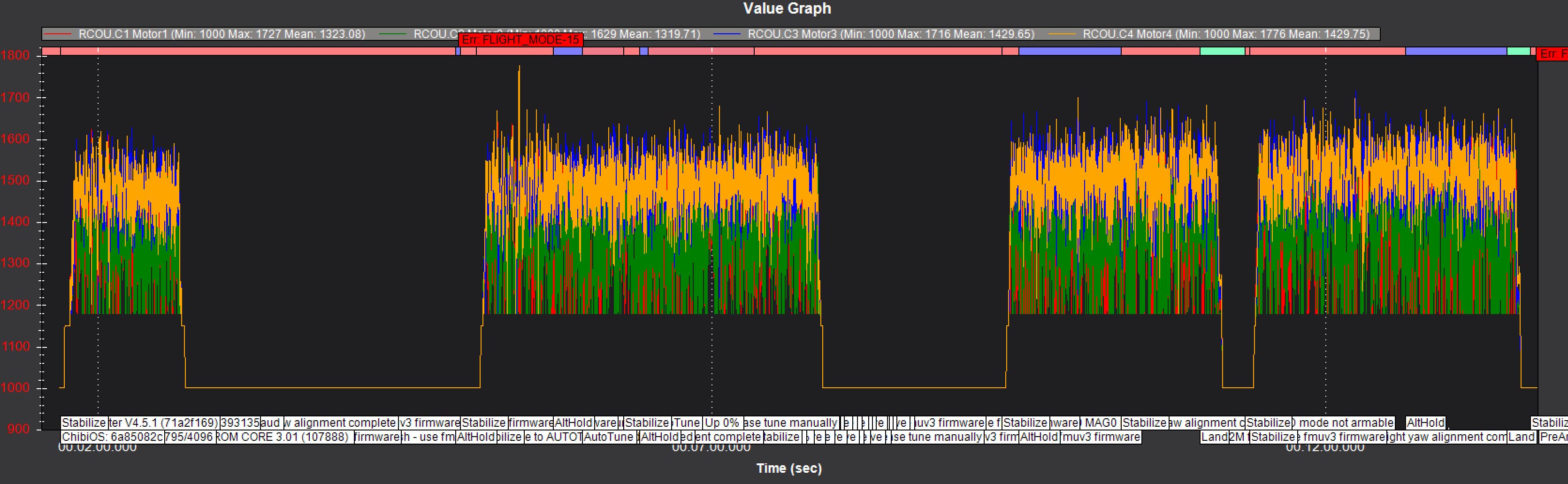
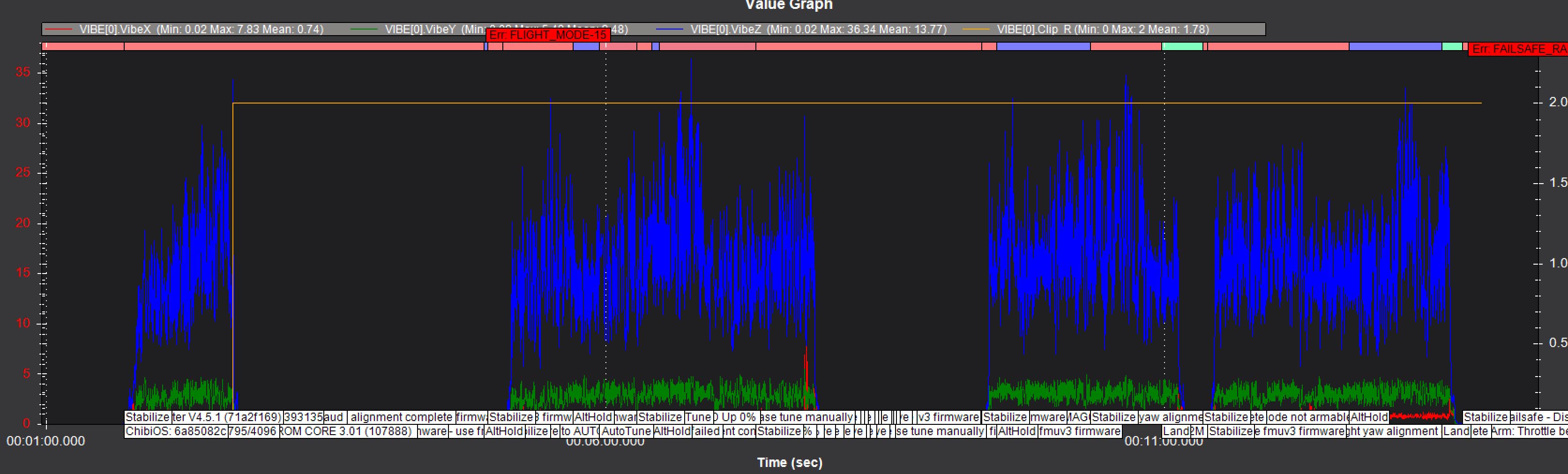
Can you please look my bin files? Ienabled the notch filter with default values from “ArduPilot Filter Review Tool”. But I dont know which parameters require which values.
Thank you for your attention and advice.