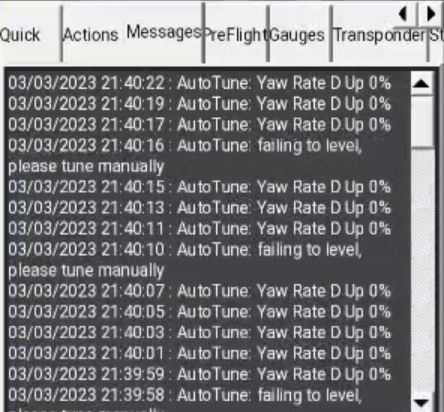
today tunning yaw axes
Yaw Rate D UP 0% stuck
Yaw Rate D Down process ok

android telemetry screen recorded uploaded and bin file
https://drive.google.com/file/d/1yTOSoG_9lTN3Rw81Jd2nZLv7qLCf2ftB/view?usp=sharing
today tunning yaw axes
Yaw Rate D UP 0% stuck
Yaw Rate D Down process ok
android telemetry screen recorded uploaded and bin file
https://drive.google.com/file/d/1yTOSoG_9lTN3Rw81Jd2nZLv7qLCf2ftB/view?usp=sharing
I faced that last year, hope it helps you.
By the way, you should Autotune Roll or Pitch first, then copy and paste the value to Pitch or Roll if your frame is symmetrical. then do yaw autotune last.
check your transmitter trims and your radio calibration I had this issue and could not seem to figure it out until I check those and recalibrated the radio after that it seemed to work great.
I am also experiencing this problem.
I have performed autotune successfully with previous firmware versions many times.
However, with the recent versions and in windy conditions, I am unable to perform autotune.
This is particularly challenging in my district where there is often a lot of wind.
You said “often a lot of wind” not " always a lot of wind".
The recommended procedure is to wait for those times when there isn’t a lot of wind. The results of Autotune are less likely to be good if done in windy conditions.
If your aircraft is getting the “failing to level” because of too much wind, then you should do a manual tune. If it is because it is poorly tuned to start with then you should do a manual tune.
may i know what do you mean by 2.5deg of level? and how to do that ?
He means that the aircraft must be tuned well enough to achieve less than a 2.5 degree difference between the target angle and measured angle.
Instructions on how to do this are here:
https://ardupilot.org/copter/docs/common-tuning.html
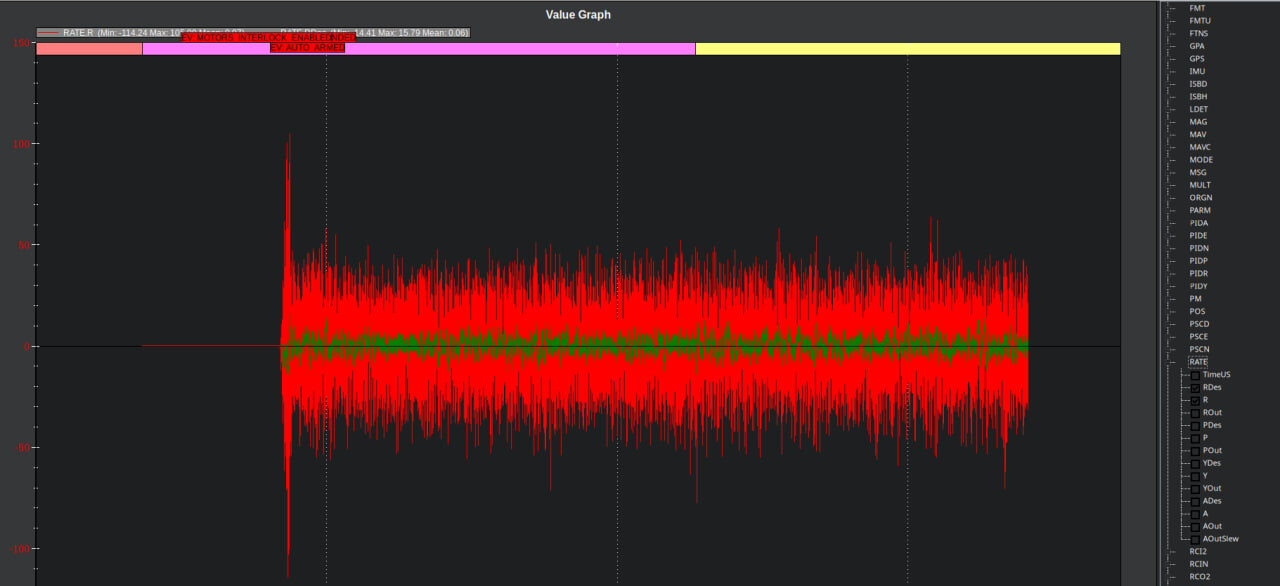
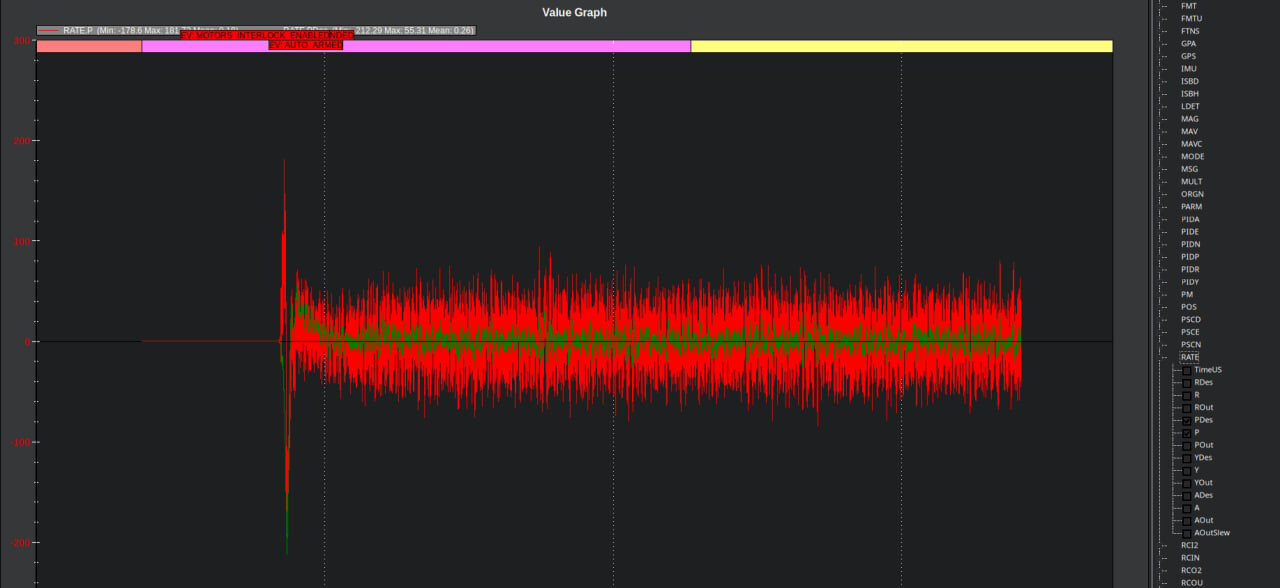
Is this the difference between RATE.RDes and RATE.R, precisely?
I have the same problem with my copter in Gazebo. Overall it flies ± stable with minimum visual oscillations (>0.5° Roll, >2° Pitch), but I can’t perform Autotune.
If I’m right, these graphs (takeoff and hovering in Loiter) show that the difference is too big, and I need to reduce it somehow (probably increase D or decrease P). I followed Manual tuning tutorial, but going out of current parameters increase oscillations, so I don’t really know what to do.
Any tips?
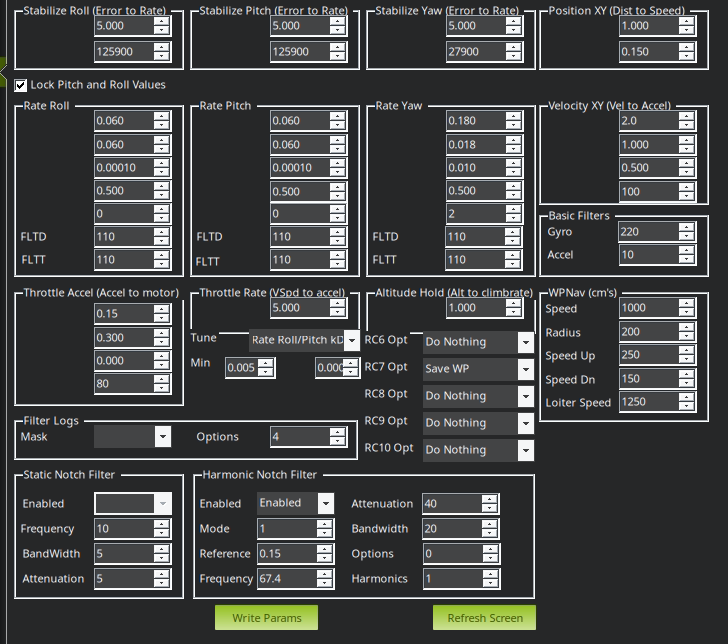
Alot of oscillations, try with Gyro settings that is recomanded for that prop size.
Tried it many times with 40 or 80, works a lot worse; the lower - the worse.
Edit: Strange for me, too. I don’t know why does it work this way.
As you go with higher numbers in Gyro filter the more noise you let in, so lowering number down to 40 can only give better results. I will check log that you posted when i got home and tell you more.
I see you are running SITL ? Your Vibe levels at hover are too high, you need to lower it before continiue tuning. Also use mission planner plugin CTRL-A and set defaults for your prop size, and battery monitor. Then do hover test and post a log file.
Just for reference, we did a pitch and roll autotune in quite some wind recently. Got a couple of failing to level messages but not much. Later we did a yaw autotune in stronger wind ![]()
The copter stayed in the area, circling around to try and face into the wind - just as it should. It was quite a nice sight to see.
Both worked out very well and the copter flies great - logs show very good attitude control.
I’d say it comes back to having a stiff frame, well matched parts and time spent ensuring parameters are as good as you can get before attacking flights and tuning.